
機(jī)器學(xué)習(xí)在組合優(yōu)化中的應(yīng)用(上)
運(yùn)籌學(xué)自二戰(zhàn)誕生以來(lái),現(xiàn)已被廣泛應(yīng)用于工業(yè)生產(chǎn)領(lǐng)域了,比如交通運(yùn)輸、供應(yīng)鏈、能源、經(jīng)濟(jì)以及生產(chǎn)調(diào)度等。離散優(yōu)化問題(discrete optimization problems)是運(yùn)籌學(xué)中非常重要的一部分,他們通常可以建模成整數(shù)優(yōu)化模型進(jìn)行求解,即通過決定一系列受約束的整數(shù)或者0-1變量,得出模型最優(yōu)解。
有一些組合優(yōu)化問題不是那么的“難”,比如最短路問題,可以在多項(xiàng)式的時(shí)間內(nèi)進(jìn)行求解。然而,對(duì)于一些NP-hard問題,就無(wú)法在多項(xiàng)式時(shí)間內(nèi)求解了。簡(jiǎn)而言之,這類問題非常復(fù)雜,實(shí)際上現(xiàn)在的組合優(yōu)化算法最多只能求解幾百萬(wàn)個(gè)變量和約束的問題而已。
機(jī)器學(xué)習(xí)是一門多領(lǐng)域交叉學(xué)科,涉及概率論、統(tǒng)計(jì)學(xué)、逼近論、凸分析、算法復(fù)雜度理論等多門學(xué)科。現(xiàn)在,有很多研究想將學(xué)習(xí)的方法應(yīng)用與組合優(yōu)化領(lǐng)域,提高傳統(tǒng)優(yōu)化算法的效率。
By the way,大家請(qǐng)?jiān)徫遥行﹩卧~我真不知道咋翻譯,就直接用英文了,所以你們閱讀的時(shí)候看見中英混用,絕不是我在裝13,而是有些情景用英文大家理解起來(lái)會(huì)更方便。
1 動(dòng)機(jī)
在組合優(yōu)化算法中使用機(jī)器學(xué)習(xí)的方法,主要有兩方面:
(1)優(yōu)化算法中某些模塊計(jì)算非常消耗時(shí)間和資源,可以利用機(jī)器學(xué)習(xí)得出一個(gè)近似的值,從而加快算法的速度。
(2)現(xiàn)存的一些優(yōu)化方法效果并不是那么顯著,希望通過學(xué)習(xí)的方法學(xué)習(xí)搜索最優(yōu)策略過程中的一些經(jīng)驗(yàn),提高當(dāng)前算法的效果。(算是一種新思路?)
2 介紹
這一節(jié)簡(jiǎn)要介紹下關(guān)于組合優(yōu)化和機(jī)器學(xué)習(xí)的一些概念,當(dāng)然,只是粗略的看一下,詳細(xì)內(nèi)容大家還是去參照以往公眾號(hào)的文章(指的組合優(yōu)化方面)。因?yàn)橹白龅囊恢笔沁\(yùn)籌優(yōu)化領(lǐng)域,對(duì)機(jī)器學(xué)習(xí)一知半解,所以關(guān)于這部分的闡述則是從網(wǎng)上篩選過來(lái)的,出處我均已貼到參考那里了。
2.1 組合優(yōu)化
組合優(yōu)化相信大家都很熟悉了,因?yàn)楣娞?hào)一直在做的就是這方面的內(nèi)容。一個(gè)組合優(yōu)化問題呢通常都能被建模成一個(gè)帶約束的最小化問題進(jìn)行求解,即將問題以數(shù)學(xué)表達(dá)式的形式給出,通過約束變量的范圍,讓變量在可行域內(nèi)作出決策,使得目標(biāo)值最小的過程。
如果決策變量是線性的,那么該問題可以稱為線性規(guī)劃(Linear programming);如果決策變量是整數(shù)或者0-1,那么可以稱為整數(shù)規(guī)劃(Integer programming);而如果決策變量是整數(shù)和線性混合的,那么可以稱為混合整數(shù)規(guī)劃(Mixed-integer programming)。可以利用branch and bound算法解決Mixed-integer programming問題,目前應(yīng)用的比較多,也有很多成熟的求解器了,比如cplex、lpsolve、國(guó)產(chǎn)的solver等等。但是就目前而言,求解器在求解效率上仍存在著問題,難以投入到實(shí)際的工業(yè)應(yīng)用中,現(xiàn)在業(yè)界用啟發(fā)式比較多。
2.2 監(jiān)督學(xué)習(xí)(supervised learning)
監(jiān)督學(xué)習(xí)(supervised learning)的任務(wù)是學(xué)習(xí)一個(gè)模型,使模型能夠?qū)θ我饨o定的輸入,對(duì)其相應(yīng)的輸出做一個(gè)好的預(yù)測(cè)。監(jiān)督學(xué)習(xí)其實(shí)就是根據(jù)已有的數(shù)據(jù)集,知道輸入與輸出的結(jié)果之間的關(guān)系,然后根據(jù)這種關(guān)系訓(xùn)練得到一個(gè)最優(yōu)的模型。
2.3 強(qiáng)化學(xué)習(xí)(Reinforcement learning)
強(qiáng)化學(xué)習(xí)(Reinforcement Learning, RL),又稱再勵(lì)學(xué)習(xí)、評(píng)價(jià)學(xué)習(xí)或增強(qiáng)學(xué)習(xí),是機(jī)器學(xué)習(xí)的范式和方法論之一,用于描述和解決智能體(agent)在與環(huán)境的交互過程中通過學(xué)習(xí)策略以達(dá)成回報(bào)最大化或?qū)崿F(xiàn)特定目標(biāo)的問題。[百度百科]
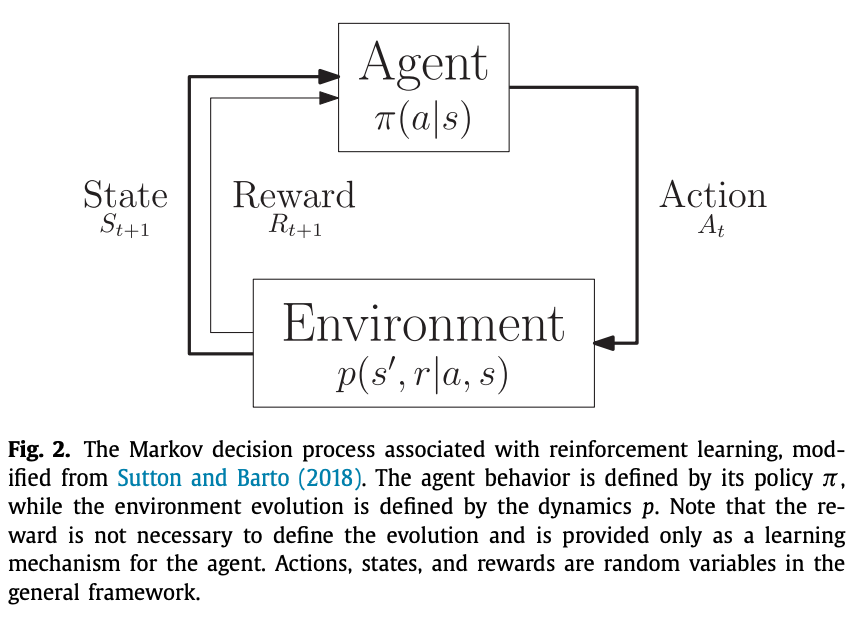
馬爾可夫決策過程(Markov Decision Processes,MDPs) MDPs 簡(jiǎn)單說就是一個(gè)智能體(Agent)采取行動(dòng)(Action)從而改變自己的狀態(tài)(State)獲得獎(jiǎng)勵(lì)(Reward)與環(huán)境(Environment)發(fā)生交互的循環(huán)過程。
MDP 的策略完全取決于當(dāng)前狀態(tài)(Only present matters),這也是它馬爾可夫性質(zhì)的體現(xiàn)。
先行動(dòng)起來(lái),如果方向正確那么就繼續(xù)前行,如果錯(cuò)了,子曰:過則勿憚改。吸取經(jīng)驗(yàn),好好改正,失敗乃成功之母,從頭再來(lái)就是。總之要行動(dòng),胡適先生說:怕什么真理無(wú)窮,進(jìn)一寸有一寸的歡喜。
即想要理解信息,獲得輸入到輸出的映射,就需要從自身的以往經(jīng)驗(yàn)中去不斷學(xué)習(xí)來(lái)獲取知識(shí),從而不需要大量已標(biāo)記的確定標(biāo)簽,只需要一個(gè)評(píng)價(jià)行為好壞的獎(jiǎng)懲機(jī)制進(jìn)行反饋,強(qiáng)化學(xué)習(xí)通過這樣的反饋?zhàn)约哼M(jìn)行“學(xué)習(xí)”。(當(dāng)前行為“好”以后就多往這個(gè)方向發(fā)展,如果“壞”就盡量避免這樣的行為,即不是直接得到了標(biāo)簽,而是自己在實(shí)際中總結(jié)得到的)
3 近來(lái)的研究
第1節(jié)的時(shí)候,我們提到了在組合優(yōu)化中使用機(jī)器學(xué)習(xí)的兩種動(dòng)機(jī),那么現(xiàn)在很多研究也是圍繞著這兩方面進(jìn)行展開的。
首先說說動(dòng)機(jī)(1),期望使用機(jī)器學(xué)習(xí)來(lái)快速得出一個(gè)近似值,從而減少優(yōu)化算法中某些模塊的計(jì)算負(fù)擔(dān),加快算法的速度。比如說在branch and price求解VRP類問題中,其子問題SPPRC的求解就是一個(gè)非常耗時(shí)的模塊,如果利用機(jī)器學(xué)習(xí),在column generation的每次迭代中能快速生成一些reduced cost為負(fù)的路徑,那整個(gè)算法的速度就非常快了。不過這個(gè)難度應(yīng)該會(huì)非常大,希望若干年后能實(shí)現(xiàn)吧~
而動(dòng)機(jī)(2)則是嘗試一種新的思路來(lái)解決組合優(yōu)化問題吧,讓機(jī)器學(xué)習(xí)算法自己去學(xué)習(xí)策略,從而應(yīng)用到算法中。比如branch and bound中關(guān)于branch node的選取,選擇的策略能夠極大地影響算法運(yùn)行的時(shí)間,目前常見的有深度優(yōu)先、廣度優(yōu)先等。但這些方法效果遠(yuǎn)沒有那么出眾,所以寄希望于新興的機(jī)器學(xué)習(xí)方法,期望能得到一些新的,outstanding的策略。
動(dòng)機(jī)(1)和動(dòng)機(jī)(2)下所使用的機(jī)器學(xué)習(xí)方法也是不同的,在開始介紹之前呢,大家先去回顧下第2節(jié)中介紹強(qiáng)化學(xué)習(xí)時(shí)提到的Markov鏈。假設(shè)environment是算法內(nèi)部當(dāng)前的狀態(tài),我們比較關(guān)心的是組合優(yōu)化算法中某個(gè)使用了機(jī)器學(xué)習(xí)來(lái)做決策的函數(shù),該函數(shù)在當(dāng)前給定的所有信息中,返回一個(gè)將要被算法執(zhí)行的action,我們暫且叫這樣的一個(gè)函數(shù)為policy吧。
那么這樣的policy是怎樣給出相應(yīng)的action呢?所謂機(jī)器學(xué)習(xí),當(dāng)然是通過學(xué)習(xí)!而學(xué)習(xí)也有很多方式,比如有些人不喜歡聽老師口口相傳,只喜歡不聽地做題,上課也在不停的刷題刷題(小編我)。有些人就上課認(rèn)認(rèn)真真聽課,課后重點(diǎn)復(fù)習(xí)老師講的內(nèi)容。所有的方式,目的都是為了獲得知識(shí),考試考高分。同樣的,在兩種動(dòng)機(jī)下,policy學(xué)習(xí)的方式也是不一樣的,我們且稱之為learning setting吧。
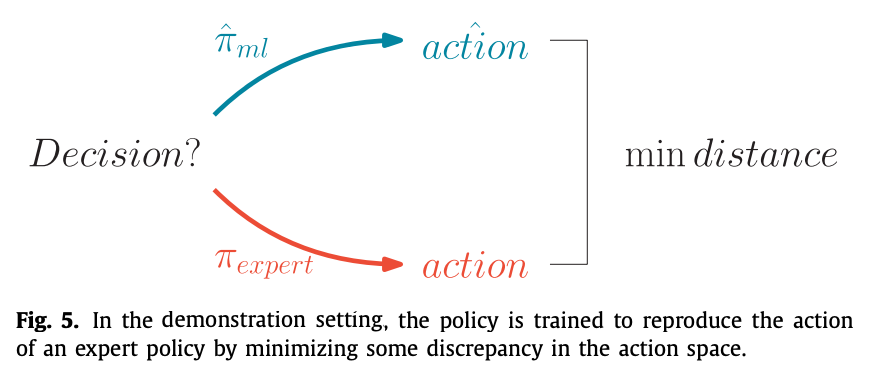
動(dòng)機(jī)(1)下使用的是demonstration setting,他是一種模仿學(xué)習(xí),蹣跚學(xué)步大家聽過吧~這種策略呢就是不斷模仿expert做的決策進(jìn)行學(xué)習(xí),也沒有什么reward啥的,反正你怎么做我也怎么做。他是通過一系列的“樣例”進(jìn)行學(xué)習(xí),比如你把TSP問題的輸入和最優(yōu)解打包丟給他,讓他進(jìn)行學(xué)習(xí),當(dāng)他學(xué)有所成時(shí),你隨便輸入一個(gè)TSP的數(shù)據(jù),他馬上(注意是非常快速的)就能給出一個(gè)結(jié)果。這個(gè)結(jié)果有可能是最優(yōu)的,也有可能是近似最優(yōu)的。當(dāng)然,下面會(huì)舉更詳細(xì)的例子進(jìn)行介紹。如下圖所示,在demonstration setting下,學(xué)習(xí)的目標(biāo)是盡可能使得policy的action和expert相近。
動(dòng)機(jī)(2)意在發(fā)現(xiàn)新的策略,policy是使用reinforcement learning通過experience進(jìn)行學(xué)習(xí)的。他是通過一種action-reward的方式,訓(xùn)練policy,使得它不斷向最優(yōu)的方向改進(jìn)。當(dāng)然了,這里為了獲得最大的reward,除了使用reinforcement learning algorithms的方法,也可以使用一些經(jīng)典的optimization methods,比如genetic algorithms, direct/local search。

簡(jiǎn)單總結(jié)一下,動(dòng)機(jī)(1)中的模仿學(xué)習(xí),其實(shí)是采用expert提供的一些target進(jìn)行學(xué)習(xí)(沒有reward)。而動(dòng)機(jī)(2)中的經(jīng)驗(yàn)學(xué)習(xí),是采用reinforcement learning從reward中不斷修正自己(沒有expert)。在動(dòng)機(jī)(1)中,agent is taught what to do。而在動(dòng)機(jī)(2)中,agent is encouraged to quickly accumulate rewards。
3.1 demonstration setting
這一節(jié)介紹下目前使用demonstration setting的一些研究現(xiàn)狀。(挑幾個(gè)有代表性的講講,詳情大家去看paper吧~)
我們知道,在求解線性規(guī)劃時(shí),通過添加cutting plane可以tighten當(dāng)前的relaxation,從而獲得一個(gè)更好的lower bound,暫且將加入cutting plane后lower bound相比原來(lái)提升的部分稱之為improvement吧。Baltean-Lugojan et al. (2018) 使用了一個(gè)neural network去對(duì)求解過程中的improvement進(jìn)行了一個(gè)近似。具體做法大家直接去看文獻(xiàn)吧,畢竟有點(diǎn)專業(yè)。
第二個(gè)例子,就是我們之前說過的,使用branch and bound求解mixed integer programming的時(shí)候,如果選擇分支的節(jié)點(diǎn),非常重要。一個(gè)有效的策略,能夠大大減少分支樹的size,從而節(jié)省大量的計(jì)算時(shí)間。目前表現(xiàn)比較好的一個(gè)heuristic策略是strong branching (Applegate, Bixby, Chva?tal, & Cook, 2007),該策略計(jì)算眾多候選節(jié)點(diǎn)的linear relaxation,以獲得一個(gè)potential lower bound improvement,最終選擇improvement最大那個(gè)節(jié)點(diǎn)進(jìn)行分支。盡管如此,分支的節(jié)點(diǎn)數(shù)目還是太大了。因此,Marcos Alvarez, Louveaux, and Wehenkel (2014, 2017)使用了一個(gè)經(jīng)典的監(jiān)督學(xué)習(xí)模型去近似strong branching的決策。He, Daume III, and Eisner (2014)學(xué)習(xí)了這樣的一個(gè)策略--選擇包含有最優(yōu)解的分支節(jié)點(diǎn)進(jìn)行分支,該算法是通過整個(gè)分支過程不斷收集expert的behaviors來(lái)進(jìn)行學(xué)習(xí)的。
3.2 experience
開局先談?wù)劥蠹曳浅J煜さ腡SP問題,在TSP問題中,獲得一個(gè)可行解是非常容易的一件事,我們只需要依次從未插入的節(jié)點(diǎn)中選擇一個(gè)節(jié)點(diǎn)并將其插入到解中,當(dāng)所有節(jié)點(diǎn)都插入到解中時(shí),就可以得到一個(gè)可行解。在貪心算法中,每次選擇一個(gè)距離上次插入節(jié)點(diǎn)最近的節(jié)點(diǎn),當(dāng)然我們最直接的做法也是這樣的。但是這樣的效果,并沒有那么的好,特別是在大規(guī)模的問題中。具體可以參考下面這篇推文:
Khalil, Dai, Zhang, Dilkina, and Song (2017a)構(gòu)建了一個(gè)貪心的啟發(fā)式框架,其中節(jié)點(diǎn)的選擇用的是graph neural network,一種能通過message passing從而處理任意有限大小graphs的neural network。對(duì)于每個(gè)節(jié)點(diǎn)的選擇,首先將問題的網(wǎng)絡(luò)圖,以及一些參數(shù)(指明哪些點(diǎn)以及被Visited了)輸入到neural network中,然后獲得每個(gè)節(jié)點(diǎn)的action value,使用reinforcement learning對(duì)這些action value進(jìn)行學(xué)習(xí),reward的使用的是當(dāng)前解的一個(gè)路徑長(zhǎng)度。
結(jié)尾
今天先介紹這么多了。以上內(nèi)容都是小編閱讀論文
Machine learning for combinatorial optimization: A methodological tour d’horizon
所得的,基本上翻譯+自己理解。但是這個(gè)paper還沒講完哦,后面還有些許的內(nèi)容,容我下篇推文再介紹啦。急不可耐的小伙伴可以直接去看原paper哦。
參考
監(jiān)督學(xué)習(xí)(supervised learning)的介紹 https://zhuanlan.zhihu.com/p/99022922
強(qiáng)化學(xué)習(xí)(Reinforcement Learning)知識(shí)整理 https://zhuanlan.zhihu.com/p/25319023
強(qiáng)化學(xué)習(xí)(Q-Learning,Sarsa) https://blog.csdn.net/qq_39388410/article/details/88795124
Baltean-Lugojan, R., Misener, R., Bonami, P., & Tramontani, A. (2018). Strong Sparse Cut Selection via Trained Neural Nets for Quadratic Semidefinite Outer-Approx- imations. Technical Report. Imperial College, London.
Applegate, D., Bixby, R., Chva?tal, V., & Cook, W. (2007). The Traveling Salesman Prob- lem: A Computational Study. Princeton University Press.
Marcos Alvarez, A., Louveaux, Q., & Wehenkel, L. (2014). A supervised machine learning approach to variable branching in branch-and-bound. Technical Report. Universite? de Lie?ge.
Marcos Alvarez, A., Louveaux, Q., & Wehenkel, L. (2017). A machine learning-based approximation of strong branching. INFORMS journal on computing, 29(1), 185–195.
He, H., Daume III, H., & Eisner, J. M. (2014). Learning to search in branch and bound algorithms. In Z. Ghahramani, M. Welling, C. Cortes, N. D. Lawrence, & K. Q. Weinberger (Eds.), Advances in neural information processing systems 27(pp. 3293–3301). Curran Associates, Inc.
Khalil, E., Dai, H., Zhang, Y., Dilkina, B., & Song, L. (2017a). Learning combinatorial optimization algorithms over graphs. In I. Guyon, U. V. Luxburg, S. Bengio, H. Wallach, R. Fergus, S. Vishwanathan, & R. Garnett (Eds.), Advances in Neural Information Processing Systems 30 (pp. 6348–6358). Curran Associates, Inc..