
自動駕駛中的機器學習
↑↑↑點擊上方藍字,回復資料,10個G的驚喜
以下為譯文:
近年來,自動駕駛技術(shù)技術(shù)的發(fā)展速度非常快。預計達到完全自動駕駛L5的程度是指日可待的。自動駕駛的核心技術(shù)主要是人工智能中的機器學習與深度學習兩個方向。在本文中,我們的關(guān)注點在于機器學習算法在自動駕駛技術(shù)中的應用。
為了讓讀者更好地理解自動駕駛中的機器學習算法,本文會首先介紹有關(guān)該設備和自動駕駛技術(shù)的運行原理,然后介紹機器學習方法及其在自動駕駛?cè)蝿罩械膽谩W詈笳故疽恍┝餍械淖詣玉{駛技術(shù)模擬器。
關(guān)于自動駕駛技術(shù)
自動駕駛技術(shù)的目的在于解除汽車對駕駛員的需求,部署了自動駕駛技術(shù)的汽車能夠完全獨立自主的地把汽車從一個地點駕駛到另一個地點。為了能夠完成這項復雜的任務,這些汽車需要配備額外的硬件和軟件系統(tǒng),幫助AI系統(tǒng)了解環(huán)境、做出決策并采取行動。自動駕駛技術(shù)需要回答以下個問題。
1.自動駕駛技術(shù)如何看到?
自動駕駛技術(shù)主要使用攝像頭、普通雷達和激光雷達三種傳感器,它們就像人眼和大腦一樣協(xié)同工作。它們共同為汽車提供了清晰的環(huán)境視圖。幫助汽車識別附近物體的位置、速度和 3維形態(tài)。此外,目前依靠的自動駕駛技術(shù)現(xiàn)在正在建設慣性測量單元,可以監(jiān)測和控制汽車的加速度和位置。
2.自動駕駛技術(shù)如何做出決策?
在通過傳感器識別到周邊物體之后,自動駕駛的決策系統(tǒng)一般通過聚類算法將周邊物體進行聚類,并根據(jù)物體位置做出決策,。
接下來我們來展示一下自動駕駛控制系統(tǒng)的工作原理,控制系統(tǒng)主要進行場景理解和決策規(guī)劃兩方面工作,系統(tǒng)主要的工作步驟如下:
傳感器:從環(huán)境中收集傳感器數(shù)據(jù);
感知和定位:識別和定位物體和標記;
場景表示:了解環(huán)境參數(shù)和特征;
規(guī)劃決策:路徑和運動規(guī)劃,根據(jù)駕駛策略尋找最優(yōu)軌跡;
控制:設置必要的車輛加速、減速、轉(zhuǎn)向和制動參數(shù)。
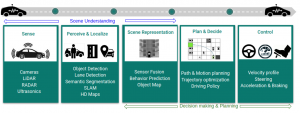
AVs 控制系統(tǒng)的主要組件
自動駕駛中的強化學習與監(jiān)督學習
機器學習是指計算機程序通過已知經(jīng)驗數(shù)據(jù)中進行訓練,通過迭代訓練以提高其在指定任務上預測準確性的過程。機器學習算法通常分為三大類流派,分別是監(jiān)督學習、無監(jiān)督學習和強化學習 (RL)。監(jiān)督學習算法基于歸納推理,通常需要使用有標記的數(shù)據(jù)進行訓練,以執(zhí)行分類或回歸,而無監(jiān)督學習一般應用于未標記數(shù)據(jù)的密度估計或聚類等技術(shù)。相比之下強化學習比較自成一派,其通過與環(huán)境交互來提高其在指定任務上的性能,與監(jiān)督和非監(jiān)督學習使用損失函數(shù)進行迭代訓練的方式不同,強化學習一般使用獎勵函數(shù)進行訓練,比如OpenAI與王者榮耀的絕悟AI都屬于強化學習的范疇,一般在電競、機器人等方向上應用較多。
根據(jù)各類機器學習算法的特點,可以看出在“場景理解”的相關(guān)任務中,使用監(jiān)督學習算法比較合適,而在“決策與規(guī)劃”任務中,又非強化學習算法莫屬。
在實際工作中,監(jiān)督學習為強化學習提供了必要的環(huán)境信息,監(jiān)督學習算法一般將“場景理解”的結(jié)果,輸入到強化學習模型當中,在監(jiān)督學習的加持下,強化學習可以完成方向盤操作優(yōu)化、路徑規(guī)劃和軌跡優(yōu)化、動態(tài)路徑規(guī)劃、基于場景的高速公路及交叉路口的合并與拆分等等高難度自動駕駛?cè)蝿眨ㄟ^來自專家系統(tǒng)的逆向強化學習,增加對于行人、車輛等交通參與者的意圖預測,并確保安全操作的執(zhí)行優(yōu)先級。
用于自動駕駛的流行算法
SIFT
SIFT算法一般用于特征提取,該算法檢測對象并解釋圖像。例如,對于三角形標志,以標志的三個頂點作為特征輸入,自動駕駛系統(tǒng)可以通過這些點來識別標志。
梯度提升
不同于在神經(jīng)網(wǎng)絡中使用的梯度下降算法,梯度提升是一種用于回歸、分類和其他任務的技術(shù),它一般以決策樹等弱預測模型基礎(chǔ)生成新的預測模型,其分類性能通常優(yōu)于隨機森林。梯度提升與下文即將出場的AdaBoost算法工作原理類似。
AdaBoost
該算法收集數(shù)據(jù)并對其進行分類,以提高自動駕駛系統(tǒng)的性能。它將各種低性能分類器進行分組,根據(jù)當前迭代中的實際性能自動調(diào)整其參數(shù),以獲得高性能分類器。在實踐中,AdaBoost技術(shù)與簡單的分類樹或樹樁作為基學習器一般合并使用,與其他單個基學習器的分類相比,這樣的方式提高了性能。
TextonBoost
TextonBoost 算法的工作原理與 AdaBoost 類似,只是它接收來形狀、上下文和外觀的數(shù)據(jù)。
HOG
HOG 是一種特征描述符,常用于從圖像數(shù)據(jù)中的特征提取。HOG 一般用于分析對象的位置,以了解對象如何變化或移動。實際操作中HOG方法主要用于人臉和圖像檢測來對圖像進行分類,還能用于識別并分類車輛類型。
YOLO
YOLO算法對于對象分類,如將圖像中的行人、樹木和車輛進行分類。YOLO使用卷積神經(jīng)網(wǎng)絡,這使其非常適合理解空間信息,并能夠提取邊緣、線條和紋理等特征。YOLO有 24 個卷積層。當激光雷達與 YOLO配合使用時,可以在擁擠的交通環(huán)境下進行導航。
用于算法測試和訓練的模擬器和數(shù)據(jù)集
模擬器是用于試驗自動駕駛系統(tǒng)的利器,特別是對于強化學習其意義更為明顯。主流的模擬器如下:
CARLA – 城市模擬器,包含攝像頭和激光雷達的信息流,有語義分割、位置信息。
TORCS – 賽車模擬器,包括攝像頭、代理位置、車輛測試控制策略。
AIRSIM – 具有深度和語義的攝像頭的數(shù)據(jù)流,并且支持無人機的自動駕駛測試。
GAZEBO (ROS) – 多機器人物理模擬器,用于復雜的二維和三維地圖中進行路徑規(guī)劃和車輛控制的測試。
SUMO – 城市交通的宏觀尺度建模,用于運動規(guī)劃測試使用。
DeepDrive – 一個基于虛幻平臺搭建的自動駕駛模擬器,提供多攝像頭數(shù)據(jù)。NVIDIA DRIVE Sim? –一種是開放、可擴展、模塊化的模擬器,支持從頭開始構(gòu)建以運行大規(guī)模、物理精確的多傳感器仿真。
WEBOTS – 一個完整的開發(fā)環(huán)境,可以用來建模、編程和模擬測試。
寫在最后
機器學習在自動駕駛領(lǐng)域發(fā)揮著重要作用。在這篇文章中,我們介紹了自動駕駛技術(shù)的一些基本知識,以及機器學習算法在自動駕駛系統(tǒng)中的應用,還簡要說明了一些在實踐中比較流行的算法以及一些用于自動駕駛測試的模擬器。最后我們可以得出結(jié)論,自動駕駛具有實現(xiàn)完全自主L5級別的潛力。這可能會減少道路交通事故,讓那些無法開車的人獨立,從而改善交通物流。
聲明:本文由CSDN翻譯,轉(zhuǎn)載請注明來源。 作者:Denis Chikurtev
推薦閱讀
(點擊標題可跳轉(zhuǎn)閱讀)
老鐵,三連支持一下,好嗎?↓↓↓