
目標檢測ssd--2016
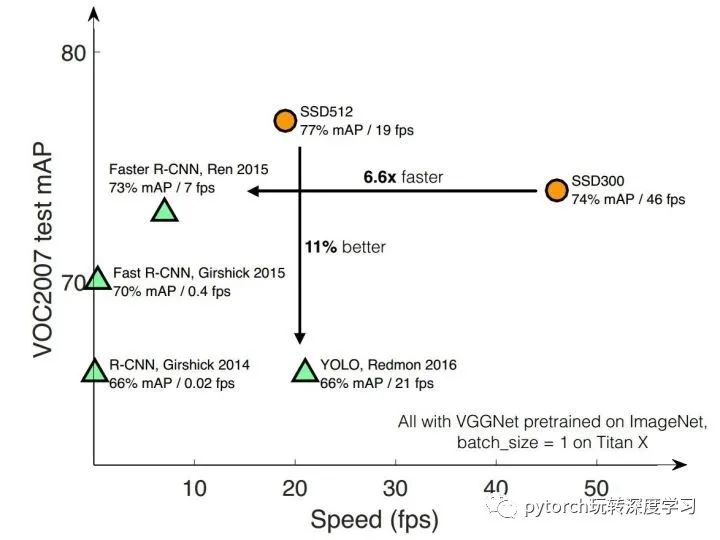
SSD,全稱Single Shot MultiBox Detector,是Wei Liu在ECCV 2016上提出的一種目標檢測算法,截至目前是主要的檢測框架之一,相比Faster RCNN有明顯的速度優(yōu)勢,相比YOLO又有明顯的mAP優(yōu)勢(不過已經(jīng)被CVPR 2017的YOLO9000超越)。
SSD具有如下主要特點:
從YOLO中繼承了將detection轉化為regression的思路,一次完成目標定位與分類
基于Faster RCNN中的Anchor,提出了相似的Prior box;
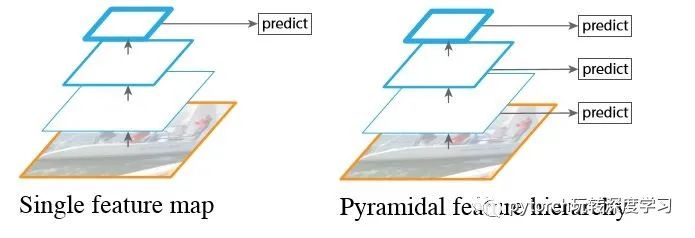
加入基于特征金字塔(Pyramidal Feature Hierarchy)的檢測方式,即在不同感受野的feature map上預測目標
本文接下來都以SSD 300為例進行分析。
1 SSD300網(wǎng)絡結構

上圖2是原論文中的SSD300與YOLO網(wǎng)絡結構圖。位什么要把SSD與YOLO對比呢?因為截止到目前目標檢測分為了2種主流框架:
Two stages:以Faster RCNN為代表,即RPN網(wǎng)絡先生成proposals目標定位,再對proposals進行classification+bounding box regression完成目標分類。
Single shot:以YOLO/SSD為代表,一次性完成classification+bounding box regression。
那么來看同為Single shot方式的SSD/YOLO區(qū)別:
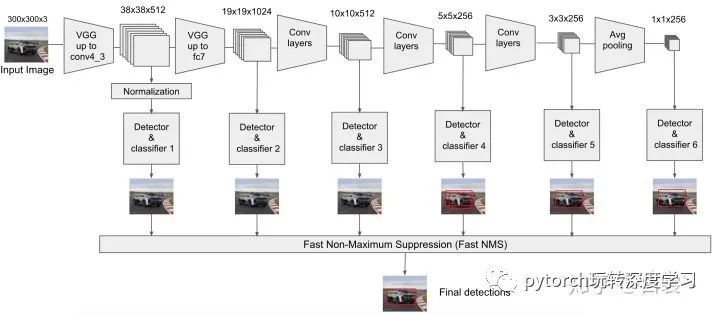
YOLO在卷積層后接全連接層,即檢測時只利用了最高層Feature maps(包括Faster RCNN也是如此)
SSD采用金字塔結構,即利用了conv4-3/conv-7/conv6-2/conv7-2/conv8_2/conv9_2這些大小不同的feature maps,在多個feature maps上同時進行softmax分類和位置回歸
SSD還加入了Prior box
對比如圖3。
2 Prior Box
在SSD300中引入了Prior Box,實際上與Faster RCNN Anchor非常類似,就是一些目標的預選框,后續(xù)通過classification+bounding box regression獲得真實目標的位置。
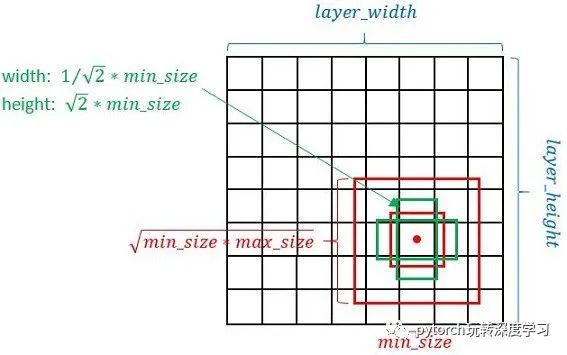
SSD按照如下規(guī)則生成prior box:
以feature map上每個點的中點為中心,生成一些列同心的prior box
正方形prior box最小邊長為和最大邊長為:


每在prototxt設置一個aspect ratio,會生成2個長方形,長寬為:


而每個feature map對應prior box的min_size和max_size由以下公式?jīng)Q定:

公式中的  是指進行預測時使用feature map的數(shù)量,如SSD300使用conv4-3等6個feature maps進行預測,所以
是指進行預測時使用feature map的數(shù)量,如SSD300使用conv4-3等6個feature maps進行預測,所以  。同時原文設定
。同時原文設定 ,
, 。
。
那么:
對于conv4-3:
 ,
,  ,
, 
對于conv-7:
 ,
,  ,
, 
....
顯然可以用上述公式推導出每個feature maps使用的Prior Box size。但是在SSD300中prior box設置并不能完全和上述公式對應:
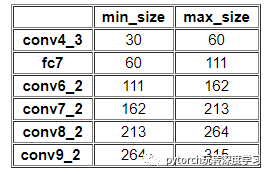
不過依然可以看出:SSD使用感受野小的feature map檢測小目標,使用感受野大的feature map檢測更大目標。
更具體一點,來看SSD300在conv4_3層的Prior Box設置conv4_3生成prior box的conv4_3_norm_priorbox層prototxt定義如下,可以清晰的看到  和
和  以及
以及  等值。
等值。
layer {
name: "conv4_3_norm_mbox_priorbox"
type: "PriorBox"
bottom: "conv4_3_norm"
bottom: "data"
top: "conv4_3_norm_mbox_priorbox"
prior_box_param {
min_size: 30.0
max_size: 60.0
aspect_ratio: 2
flip: true
clip: false
variance: 0.1
variance: 0.1
variance: 0.2
variance: 0.2
step: 8
offset: 0.5
}
}知道了priorbox如何產(chǎn)生,接下來分析prior box如何使用。這里還是以conv4_3分析。
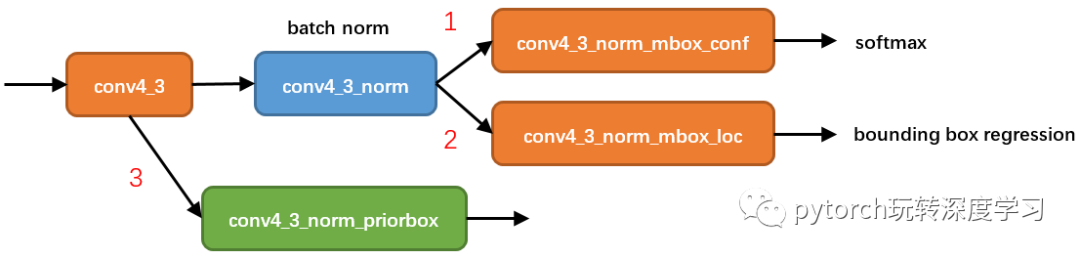
從圖5可以看到,在conv4_3網(wǎng)絡分為了3條線路:
經(jīng)過一次batch norm+一次卷積后,生成了[1, num_class*num_priorbox, layer_height, layer_width]大小的feature用于softmax分類目標和非目標(其中num_class是目標類別,SSD300中num_class = 21,即20個類別+1個背景)
經(jīng)過一次batch norm+一次卷積后,生成了[1, 4*num_priorbox, layer_height, layer_width]大小的feature用于bounding box regression(即每個點一組[dxmin,dymin,dxmax,dymax],參考Faster R-CNN 2.5節(jié))
生成了[1, 2, 4*num_priorbox*layer_height*layer_width]大小的prior box blob,其中2個channel分別存儲prior box的4個點坐標(x1, y1, x2, y2)和對應的4個參數(shù)variance
后續(xù)通過softmax分類判定Prior box是否包含目標,然后再通過bounding box regression即可可獲取目標的精確位置,熟悉Faster RCNN的讀者應該對上述過程應該并不陌生。其實pribox box的與Faster RCNN中的anchor非常類似,都是目標的預設框,沒有本質的差異。區(qū)別是每個位置的prior box一般是4~6個,少于Faster RCNN默認的9個anchor;同時prior box是設置在不同尺度的feature maps上的,而且大小不同。
還有一個細節(jié)就是上面prototxt中的4個variance,這實際上是一種bounding regression中的權重。在圖4線路(2)中,網(wǎng)絡輸出[dxmin,dymin,dxmax,dymax],即對應下面代碼中bbox;然后利用如下方法進行針對prior box的位置回歸:
decode_bbox->set_xmin(
prior_bbox.xmin() + prior_variance[0] * bbox.xmin() * prior_width);
decode_bbox->set_ymin(
prior_bbox.ymin() + prior_variance[1] * bbox.ymin() * prior_height);
decode_bbox->set_xmax(
prior_bbox.xmax() + prior_variance[2] * bbox.xmax() * prior_width);
decode_bbox->set_ymax(
prior_bbox.ymax() + prior_variance[3] * bbox.ymax() * prior_height);
上述代碼可以在SSD box_utils.cpp的void DecodeBBox()函數(shù)見到。
3 SSD的數(shù)據(jù)流
對于新學習SSD的人,肯定有一個很大的困惑,就是這么多feature maps和Prior Box,如何組合在一起進行forwards/backwards。本節(jié)專門介紹SSD的數(shù)據(jù)流動方式,也許有點難。但是只有了解SSD的數(shù)據(jù)流動方式才能真的理解。
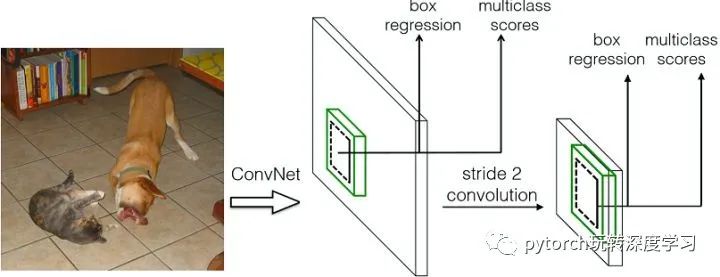
上一節(jié)以conv4_3 feature map分析了如何檢測到目標的真實位置,但是SSD 300是使用包括conv4_3在內的共計6個feature maps一同檢測出最終目標的。在網(wǎng)絡運行的時候顯然不能像圖6一樣:一個feature map單獨計算一次multiclass softmax socre+box regression(雖然原理如此,但是不能如此實現(xiàn))。
那么多個feature maps如何協(xié)同工作?這時候就要用到Permute,F(xiàn)latten和Concat這3種層了。其中conv4_3_norm_conf_perm的prototxt定義如下:
layer {
name: "conv4_3_norm_mbox_conf_perm"
type: "Permute"
bottom: "conv4_3_norm_mbox_conf"
top: "conv4_3_norm_mbox_conf_perm"
permute_param {
order: 0
order: 2
order: 3
order: 1
}
}
Permute是SSD中自帶的層,上面conv4_3_norm_mbox_conf_perm的的定義。Permute相當于交換caffe blob中的數(shù)據(jù)維度。在正常情況下caffe blob的順序為:
bottom blob = [batch_num, channel, height, width]
經(jīng)過conv4_3_norm_mbox_conf_perm后的caffe blob為:
top blob = [batch_num, height, width, channel]
而Flattlen和Concat層都是caffe自帶層,請參照caffe official documentation理解。
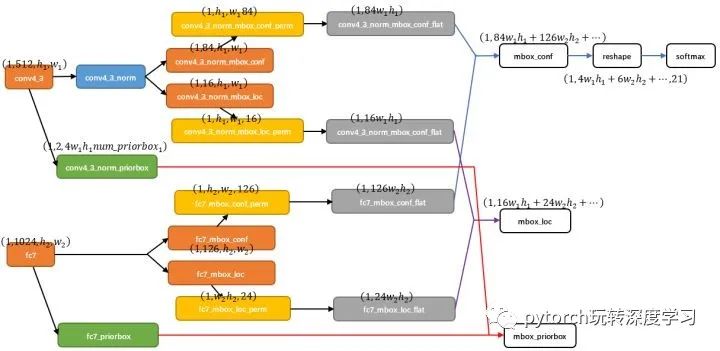
那么接下來以conv4_3和fc7為例分析SSD是如何將不同size的feature map組合在一起進行prediction。圖7展示了conv4_3和fc7合并在一起的過程中caffe blob shape變化(其他層類似,考慮到圖片大小沒有畫出來,請腦補)。
對于conv4_3 feature map,conv4_3_norm_priorbox(priorbox層)設置了每個點共有4個prior box。由于SSD 300共有21個分類,所以conv4_3_norm_mbox_conf的channel值為num_priorbox * num_class = 4 * 21 = 84;而每個prior box都要回歸出4個位置變換量,所以conv4_3_norm_mbox_loc的caffe blob channel值為4 * 4 = 16。
fc7每個點有6個prior box,其他feature map同理。
經(jīng)過一系列圖7展示的caffe blob shape變化后,最后拼接成mbox_conf和mbox_loc。而mbox_conf后接reshape,再進行softmax(為何在softmax前進行reshape,F(xiàn)aster RCNN有提及)。
最后這些值輸出detection_out_layer,獲得檢測結果
可以看到,SSD一次判斷priorbox到底是背景 or 是20種目標類別之一,相當于將Faster R-CNN的RPN與后續(xù)proposal再分類進行了整合。
4 SSD網(wǎng)絡結構優(yōu)劣分析
SSD算法的優(yōu)點應該很明顯:運行速度可以和YOLO媲美,檢測精度可以和Faster RCNN媲美。除此之外,還有一些雞毛蒜皮的優(yōu)點,不解釋了。這里談談缺點:
需要人工設置prior box的min_size,max_size和aspect_ratio值。網(wǎng)絡中prior box的基礎大小和形狀不能直接通過學習獲得,而是需要手工設置。而網(wǎng)絡中每一層feature使用的prior box大小和形狀恰好都不一樣,導致調試過程非常依賴經(jīng)驗。
雖然采用了pyramdial feature hierarchy的思路,但是對小目標的recall依然一般,并沒有達到碾壓Faster RCNN的級別。作者認為,這是由于SSD使用conv4_3低級feature去檢測小目標,而低級特征卷積層數(shù)少,存在特征提取不充分的問題。
5 SSD訓練過程

對于SSD,雖然paper中指出采用了所謂的“multibox loss”,但是依然可以清晰看到SSD loss分為了confidence loss和location loss(bouding box regression loss)兩部分,其中N是match到GT(Ground Truth)的prior box數(shù)量;而α參數(shù)用于調整confidence loss和location loss之間的比例,默認α=1。SSD中的confidence loss是典型的softmax loss:

其中
代表第i個prior box匹配到了第j個class為p類別的GT box;而location loss是典型的smooth L1 loss:

Matching strategy:
在訓練時,groundtruth boxes 與 default boxes(就是prior boxes) 按照如下方式進行配對:
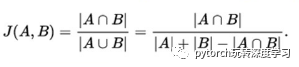
首先,尋找與每一個ground truth box有最大的jaccard overlap的default box,這樣就能保證每一個groundtruth box與唯一的一個default box對應起來(所謂的jaccard overlap就是IoU,如圖9)。
SSD之后又將剩余還沒有配對的default box與任意一個groundtruth box嘗試配對,只要兩者之間的jaccard overlap大于閾值,就認為match(SSD 300 閾值為0.5)。
顯然配對到GT的default box就是positive,沒有配對到GT的default box就是negative。
Hard negative mining:
值得注意的是,一般情況下negative default boxes數(shù)量>>positive default boxes數(shù)量,直接訓練會導致網(wǎng)絡過于重視負樣本,從而loss不穩(wěn)定。所以需要采取:
所以SSD在訓練時會依據(jù)confidience score排序default box,挑選其中confidence高的box進行訓練,控制

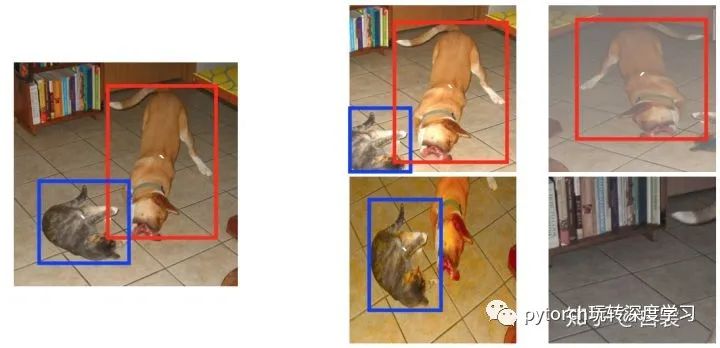
Data augmentation:
數(shù)據(jù)增廣。即對每一張image進行如下之一變換獲取一個patch進行訓練:
直接使用原始的圖像(即不進行變換)
采樣一個patch,保證與GT之間最小的IoU為:0.1,0.3,0.5,0.7 或 0.9
完全隨機的采樣一個patch
同時在原文中還提到:
采樣的patch占原始圖像大小比例在
 之間
之間采樣的patch的長寬比在
 之間
之間當 Ground truth box中心恰好在采樣的patch中時,保留整個GT box
最后每個patch被resize到固定大小,并且以0.5的概率隨機的水平翻轉
最終以這些處理好的patches進行訓練。
其實Matching strategy,Hard negative mining,Data augmentation,都是為了加快網(wǎng)絡收斂而設計的。尤其是Data augmentation,翻來覆去的randomly crop,保證每一個prior box都獲得充分訓練而已。后續(xù)有Focal loss解決這個問題。