破世界紀(jì)錄了0.74秒!用代碼實(shí)現(xiàn)自動(dòng)掃雷!
中級(jí) - 0.74秒 3BV/S=60.81
相信許多人很早就知道有掃雷這么一款經(jīng)典的游(顯卡測(cè)試)戲(軟件),更是有不少人曾聽(tīng)說(shuō)過(guò)中國(guó)雷圣,也是中國(guó)掃雷第一、世界綜合排名第二的郭蔚嘉的頂頂大名。掃雷作為一款在Windows9x時(shí)代就已經(jīng)誕生的經(jīng)典游戲,從過(guò)去到現(xiàn)在依然都有著它獨(dú)特的魅力:快節(jié)奏高精準(zhǔn)的鼠標(biāo)操作要求、快速的反應(yīng)能力、刷新紀(jì)錄的快感,這些都是掃雷給雷友們帶來(lái)的、只屬于掃雷的獨(dú)一無(wú)二的興奮點(diǎn)。
準(zhǔn)備動(dòng)手制作一套掃雷自動(dòng)化軟件之前,你需要準(zhǔn)備如下一些工具/軟件/環(huán)境
- 開(kāi)發(fā)環(huán)境
Python3 環(huán)境 - 推薦3.6或者以上?[更加推薦Anaconda3,以下很多依賴庫(kù)無(wú)需安裝]
numpy依賴庫(kù) [如有Anaconda則無(wú)需安裝]
PIL依賴庫(kù) [如有Anaconda則無(wú)需安裝]
opencv-python
win32gui、win32api依賴庫(kù)
支持Python的IDE [可選,如果你能忍受用文本編輯器寫程序也可以]
- 掃雷軟件
· Minesweeper Arbiter(必須使用MS-Arbiter來(lái)進(jìn)行掃雷!)
好啦,那么我們的準(zhǔn)備工作已經(jīng)全部完成了!讓我們開(kāi)始吧~
在去做一件事情之前最重要的是什么?是將要做的這件事情在心中搭建一個(gè)步驟框架。只有這樣,才能保證在去做這件事的過(guò)程中,盡可能的做到深思熟慮,使得最終有個(gè)好的結(jié)果。我們寫程序也要盡可能做到在正式開(kāi)始開(kāi)發(fā)之前,在心中有個(gè)大致的思路。
對(duì)于本項(xiàng)目而言,大致的開(kāi)發(fā)過(guò)程是這樣的:
完成窗體內(nèi)容截取部分
完成雷塊分割部分
完成雷塊類型識(shí)別部分
完成掃雷算法
好啦,既然我們有了個(gè)思路,那就擼起袖子大力干!
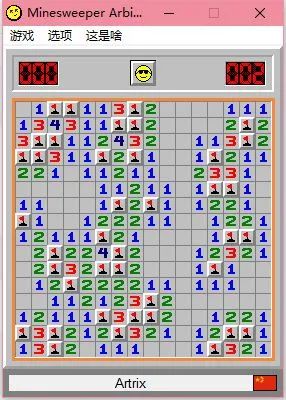
其實(shí)對(duì)于本項(xiàng)目而言,窗體截取是一個(gè)邏輯上簡(jiǎn)單,實(shí)現(xiàn)起來(lái)卻相當(dāng)麻煩的部分,而且還是必不可少的部分。我們通過(guò)Spy++得到了以下兩點(diǎn)信息:
class_name = "TMain"title_name = "Minesweeper Arbiter "
ms_arbiter.exe的主窗體類別為"TMain"
ms_arbiter.exe的主窗體名稱為"Minesweeper Arbiter "
注意到了么?主窗體的名稱后面有個(gè)空格。正是這個(gè)空格讓筆者困擾了一會(huì)兒,只有加上這個(gè)空格,win32gui才能夠正常的獲取到窗體的句柄。
本項(xiàng)目采用了win32gui來(lái)獲取窗體的位置信息,具體代碼如下:
hwnd = win32gui.FindWindow(class_name, title_name)if hwnd:left, top, right, bottom = win32gui.GetWindowRect(hwnd)
通過(guò)以上代碼,我們得到了窗體相對(duì)于整塊屏幕的位置。之后我們需要通過(guò)PIL來(lái)進(jìn)行掃雷界面的棋盤截取。
我們需要先導(dǎo)入PIL庫(kù)
from PIL import ImageGrab然后進(jìn)行具體的操作。
left += 15top += 101right -= 15bottom -= 43rect = (left, top, right, bottom)img = ImageGrab.grab().crop(rect)
聰明的你肯定一眼就發(fā)現(xiàn)了那些奇奇怪怪的Magic Numbers,沒(méi)錯(cuò),這的確是Magic Numbers,是我們通過(guò)一點(diǎn)點(diǎn)細(xì)微調(diào)節(jié)得到的整個(gè)棋盤相對(duì)于窗體的位置。
注意:這些數(shù)據(jù)僅在Windows10下測(cè)試通過(guò),如果在別的Windows系統(tǒng)下,不保證相對(duì)位置的正確性,因?yàn)槔习姹镜南到y(tǒng)可能有不同寬度的窗體邊框。
好啦,棋盤的圖像我們有了,下一步就是對(duì)各個(gè)雷塊進(jìn)行圖像分割了~

在進(jìn)行雷塊分割之前,我們事先需要了解雷塊的尺寸以及它的邊框大小。經(jīng)過(guò)筆者的測(cè)量,在ms_arbiter下,每一個(gè)雷塊的尺寸為16px*16px。
知道了雷塊的尺寸,我們就可以進(jìn)行每一個(gè)雷塊的裁剪了。首先我們需要知道在橫和豎兩個(gè)方向上雷塊的數(shù)量。
block_width, block_height = 16, 16blocks_x = int((right - left) / block_width)blocks_y = int((bottom - top) / block_height)
之后,我們建立一個(gè)二維數(shù)組用于存儲(chǔ)每一個(gè)雷塊的圖像,并且進(jìn)行圖像分割,保存在之前建立的數(shù)組中。
def crop_block(hole_img, x, y):x1, y1 = x * block_width, y * block_heightx2, y2 = x1 + block_width, y1 + block_heightreturn hole_img.crop((x1, y1, x2, y2))blocks_img = [[0 for i in range(blocks_y)] for i in range(blocks_x)]for y in range(blocks_y):for x in range(blocks_x):blocks_img[x][y] = crop_block(img, x, y)
將整個(gè)圖像獲取、分割的部分封裝成一個(gè)庫(kù),隨時(shí)調(diào)用就OK啦~在筆者的實(shí)現(xiàn)中,我們將這一部分封裝成了imageProcess.py,其中函數(shù)get_frame()用于完成上述的圖像獲取、分割過(guò)程。
這一部分可能是整個(gè)項(xiàng)目里除了掃雷算法本身之外最重要的部分了。筆者在進(jìn)行雷塊檢測(cè)的時(shí)候采用了比較簡(jiǎn)單的特征,高效并且可以滿足要求。
def analyze_block(self, block, location):block = imageProcess.pil_to_cv(block)block_color = block[8, 8]x, y = location[0], location[1]# -1:Not opened# -2:Opened but blank# -3:Un initialized# Openedif self.equal(block_color, self.rgb_to_bgr((192, 192, 192))):if not self.equal(block[8, 1], self.rgb_to_bgr((255, 255, 255))):self.blocks_num[x][y] = -2self.is_started = Trueelse:self.blocks_num[x][y] = -1elif self.equal(block_color, self.rgb_to_bgr((0, 0, 255))):self.blocks_num[x][y] = 1elif self.equal(block_color, self.rgb_to_bgr((0, 128, 0))):self.blocks_num[x][y] = 2elif self.equal(block_color, self.rgb_to_bgr((255, 0, 0))):self.blocks_num[x][y] = 3elif self.equal(block_color, self.rgb_to_bgr((0, 0, 128))):self.blocks_num[x][y] = 4elif self.equal(block_color, self.rgb_to_bgr((128, 0, 0))):self.blocks_num[x][y] = 5elif self.equal(block_color, self.rgb_to_bgr((0, 128, 128))):self.blocks_num[x][y] = 6elif self.equal(block_color, self.rgb_to_bgr((0, 0, 0))):if self.equal(block[6, 6], self.rgb_to_bgr((255, 255, 255))):# Is mineself.blocks_num[x][y] = 9elif self.equal(block[5, 8], self.rgb_to_bgr((255, 0, 0))):# Is flagself.blocks_num[x][y] = 0else:self.blocks_num[x][y] = 7elif self.equal(block_color, self.rgb_to_bgr((128, 128, 128))):self.blocks_num[x][y] = 8else:self.blocks_num[x][y] = -3self.is_mine_form = Falseif self.blocks_num[x][y] == -3 or not self.blocks_num[x][y] == -1:self.is_new_start = False
可以看到,我們采用了讀取每個(gè)雷塊的中心點(diǎn)像素的方式來(lái)判斷雷塊的類別,并且針對(duì)插旗、未點(diǎn)開(kāi)、已點(diǎn)開(kāi)但是空白等情況進(jìn)行了進(jìn)一步判斷。具體色值是筆者直接取色得到的,并且屏幕截圖的色彩也沒(méi)有經(jīng)過(guò)壓縮,所以通過(guò)中心像素結(jié)合其他特征點(diǎn)來(lái)判斷類別已經(jīng)足夠了,并且做到了高效率。
在本項(xiàng)目中,我們實(shí)現(xiàn)的時(shí)候采用了如下標(biāo)注方式:
1-8:表示數(shù)字1到8
9:表示是地雷
0:表示插旗
-1:表示未打開(kāi)
-2:表示打開(kāi)但是空白
-3:表示不是掃雷游戲中的任何方塊類型
通過(guò)這種簡(jiǎn)單快速又有效的方式,我們成功實(shí)現(xiàn)了高效率的圖像識(shí)別。
這可能是本篇文章最激動(dòng)人心的部分了。在這里我們需要先說(shuō)明一下具體的掃雷算法思路:
遍歷每一個(gè)已經(jīng)有數(shù)字的雷塊,判斷在它周圍的九宮格內(nèi)未被打開(kāi)的雷塊數(shù)量是否和本身數(shù)字相同,如果相同則表明周圍九宮格內(nèi)全部都是地雷,進(jìn)行標(biāo)記。
再次遍歷每一個(gè)有數(shù)字的雷塊,取九宮格范圍內(nèi)所有未被打開(kāi)的雷塊,去除已經(jīng)被上一次遍歷標(biāo)記為地雷的雷塊,記錄并且點(diǎn)開(kāi)。
如果以上方式無(wú)法繼續(xù)進(jìn)行,那么說(shuō)明遇到了死局,選擇在當(dāng)前所有未打開(kāi)的雷塊中隨機(jī)點(diǎn)擊。(當(dāng)然這個(gè)方法不是最優(yōu)的,有更加優(yōu)秀的解決方案,但是實(shí)現(xiàn)相對(duì)麻煩)
基本的掃雷流程就是這樣,那么讓我們來(lái)親手實(shí)現(xiàn)它吧~
首先我們需要一個(gè)能夠找出一個(gè)雷塊的九宮格范圍的所有方塊位置的方法。因?yàn)閽呃子螒虻奶厥庑裕谄灞P的四邊是沒(méi)有九宮格的邊緣部分的,所以我們需要篩選來(lái)排除掉可能超過(guò)邊界的訪問(wèn)。
def generate_kernel(k, k_width, k_height, block_location):ls = []loc_x, loc_y = block_location[0], block_location[1]for now_y in range(k_height):for now_x in range(k_width):if k[now_y][now_x]:rel_x, rel_y = now_x - 1, now_y - 1ls.append((loc_y + rel_y, loc_x + rel_x))return lskernel_width, kernel_height = 3, 3# Kernel mode:[Row][Col]kernel = [[1, 1, 1], [1, 1, 1], [1, 1, 1]]# Left borderif x == 0:for i in range(kernel_height):kernel[i][0] = 0# Right borderif x == self.blocks_x - 1:for i in range(kernel_height):kernel[i][kernel_width - 1] = 0# Top borderif y == 0:for i in range(kernel_width):kernel[0][i] = 0# Bottom borderif y == self.blocks_y - 1:for i in range(kernel_width):kernel[kernel_height - 1][i] = 0# Generate the search mapto_visit = generate_kernel(kernel, kernel_width, kernel_height, location)
我們?cè)谶@一部分通過(guò)檢測(cè)當(dāng)前雷塊是否在棋盤的各個(gè)邊緣來(lái)進(jìn)行核的刪除(在核中,1為保留,0為舍棄),之后通過(guò)generate_kernel函數(shù)來(lái)進(jìn)行最終坐標(biāo)的生成。
def count_unopen_blocks(blocks):count = 0for single_block in blocks:if self.blocks_num[single_block[1]][single_block[0]] == -1:count += 1return countdef mark_as_mine(blocks):for single_block in blocks:if self.blocks_num[single_block[1]][single_block[0]] == -1:self.blocks_is_mine[single_block[1]][single_block[0]] = 1unopen_blocks = count_unopen_blocks(to_visit)if unopen_blocks == self.blocks_num[x][y]:mark_as_mine(to_visit)
在完成核的生成之后,我們有了一個(gè)需要去檢測(cè)的雷塊“地址簿”:to_visit。之后,我們通過(guò)count_unopen_blocks函數(shù)來(lái)統(tǒng)計(jì)周圍九宮格范圍的未打開(kāi)數(shù)量,并且和當(dāng)前雷塊的數(shù)字進(jìn)行比對(duì),如果相等則將所有九宮格內(nèi)雷塊通過(guò)mark_as_mine函數(shù)來(lái)標(biāo)注為地雷。
def mark_to_click_block(blocks):for single_block in blocks:# Not Mineif not self.blocks_is_mine[single_block[1]][single_block[0]] == 1:# Click-ableif self.blocks_num[single_block[1]][single_block[0]] == -1:# Source Syntax: [y][x] - Convertedif not (single_block[1], single_block[0]) in self.next_steps:self.next_steps.append((single_block[1], single_block[0]))def count_mines(blocks):count = 0for single_block in blocks:if self.blocks_is_mine[single_block[1]][single_block[0]] == 1:count += 1return countmines_count = count_mines(to_visit)if mines_count == block:mark_to_click_block(to_visit)
掃雷流程中的第二步我們也采用了和第一步相近的方法來(lái)實(shí)現(xiàn)。先用和第一步完全一樣的方法來(lái)生成需要訪問(wèn)的雷塊的核,之后生成具體的雷塊位置,通過(guò)count_mines函數(shù)來(lái)獲取九宮格范圍內(nèi)所有雷塊的數(shù)量,并且判斷當(dāng)前九宮格內(nèi)所有雷塊是否已經(jīng)被檢測(cè)出來(lái)。
如果是,則通過(guò)mark_to_click_block函數(shù)來(lái)排除九宮格內(nèi)已經(jīng)被標(biāo)記為地雷的雷塊,并且將剩余的安全雷塊加入next_steps數(shù)組內(nèi)。
# Analyze the number of blocksself.iterate_blocks_image(BoomMine.analyze_block)# Mark all minesself.iterate_blocks_number(BoomMine.detect_mine)# Calculate where to clickself.iterate_blocks_number(BoomMine.detect_to_click_block)if self.is_in_form(mouseOperation.get_mouse_point()):for to_click in self.next_steps:on_screen_location = self.rel_loc_to_real(to_click)mouseOperation.mouse_move(on_screen_location[0], on_screen_location[1])mouseOperation.mouse_click()
在最終的實(shí)現(xiàn)內(nèi),筆者將幾個(gè)過(guò)程都封裝成為了函數(shù),并且可以通過(guò)iterate_blocks_number方法來(lái)對(duì)所有雷塊都使用傳入的函數(shù)來(lái)進(jìn)行處理,這有點(diǎn)類似Python中Filter的作用。
之后筆者做的工作就是判斷當(dāng)前鼠標(biāo)位置是否在棋盤之內(nèi),如果是,就會(huì)自動(dòng)開(kāi)始識(shí)別并且點(diǎn)擊。具體的點(diǎn)擊部分,筆者采用了作者為"wp"的一份代碼(從互聯(lián)網(wǎng)搜集而得),里面實(shí)現(xiàn)了基于win32api的窗體消息發(fā)送工作,進(jìn)而完成了鼠標(biāo)移動(dòng)和點(diǎn)擊的操作。具體實(shí)現(xiàn)封裝在mouseOperation.py中,有興趣可以在文末的Github Repo中查看。
項(xiàng)目完整代碼/GitHub地址:https://github.com/ArtrixTech/BoomMine ?END?
贈(zèng)書福利 贈(zèng)送新書《深入淺出Python量化交易實(shí)戰(zhàn)》共5本,剛剛上架!由「?清華大學(xué)出版社」贊助提供?,感興趣的朋友推薦入手一本。
本書主要以國(guó)內(nèi)A股市場(chǎng)為例,借助第三方量化交易平臺(tái),講述了KNN、線性模型、決策樹(shù)、支持向量機(jī)、樸素貝葉斯等常見(jiàn)機(jī)器學(xué)習(xí)算法在交易策略中的應(yīng)用,同時(shí)展示了如何對(duì)策略進(jìn)行回測(cè),以便讓讀者能夠有效評(píng)估自己的策略。 另外,本書還講解了自然語(yǔ)言處理(NLP)技術(shù)在量化交易領(lǐng)域的發(fā)展趨勢(shì),并使用時(shí)下熱門的深度學(xué)習(xí)技術(shù),向讀者介紹了多層感知機(jī)、卷積神經(jīng)網(wǎng)絡(luò),以及長(zhǎng)短期記憶網(wǎng)絡(luò)在量化交易方面的前瞻性應(yīng)用。
同樣這次準(zhǔn)備了2種方式抽獎(jiǎng),「評(píng)論點(diǎn)贊、朋友圈點(diǎn)贊」這兩種方式都可以參與!感謝親愛(ài)的讀者們,你們的支持也是我持續(xù)更文最大的動(dòng)力。
本次開(kāi)獎(jiǎng)時(shí)間為 2022.2.19 14:00
為了避免中獎(jiǎng)后失聯(lián),提前加我微信號(hào):itcodexy 。
留言點(diǎn)贊(2本) 留言點(diǎn)贊數(shù)「第一、二名」可獲得一本《深入淺出Python量化交易實(shí)戰(zhàn)》 PS:買點(diǎn)贊數(shù)等作弊無(wú)效,一切解釋權(quán)歸程序IT圈所有,留言點(diǎn)贊之前中過(guò)獎(jiǎng)的朋友,1年內(nèi)不得再參與,給新朋友一些機(jī)會(huì) !(經(jīng)常發(fā)現(xiàn)點(diǎn)贊中獎(jiǎng)的總是那些熟悉的面孔) 朋友圈點(diǎn)贊抽獎(jiǎng)(3本)
記得先添加我微信,不然參加不了這個(gè)朋友圈活動(dòng) 。 大獎(jiǎng):本文章我會(huì)轉(zhuǎn)發(fā)朋友圈,給第n位(具體數(shù)值看朋友圈發(fā)布時(shí)的規(guī)則)點(diǎn)贊朋友圈的同學(xué)送出一本? 《深入淺出Python量化交易實(shí)戰(zhàn)》,共2位。