
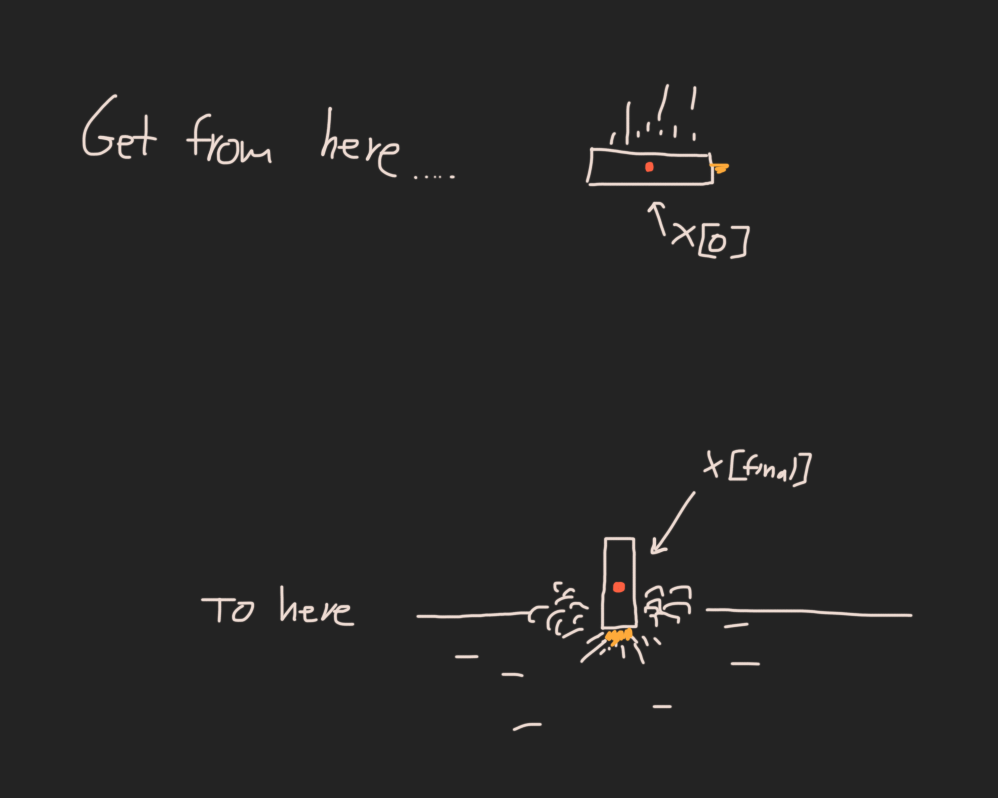
用 Python 解釋 SpaceX 如何進行火箭回收

https://www.youtube.com/watch?v=wlkRYMVUZTshttps://colab.research.google.com/drive/18MVtu4reVJLBE1RXByQEmu0O9aLXlMHz?usp=sharing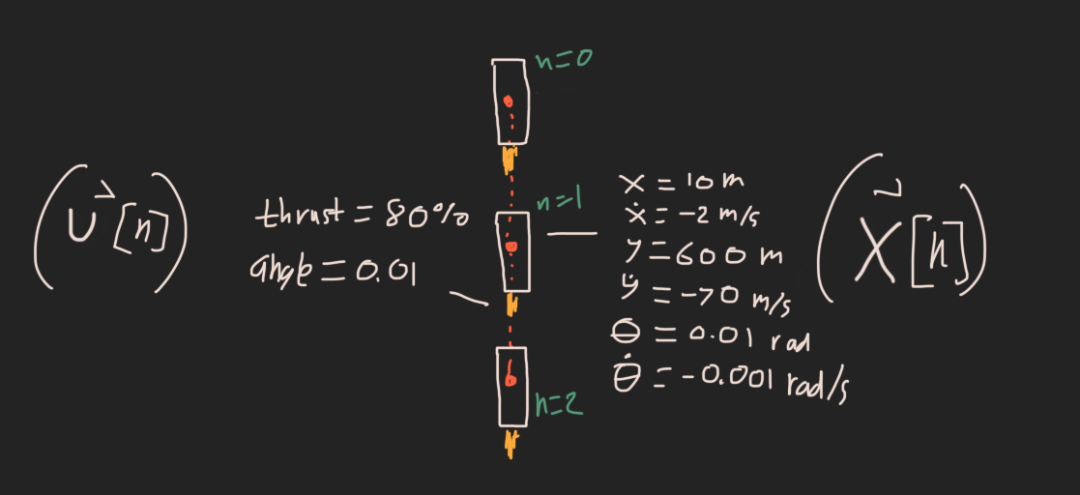
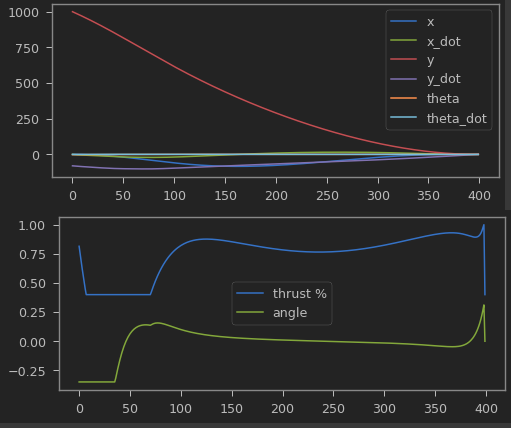
x[n] = [x, x_dot, y, y_dot, theta, theta_dot]u[n] = [thrust_mag, thrust_angle]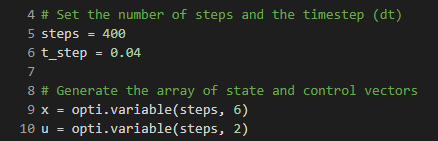


https://flightclub.io/result/2d?code = SN91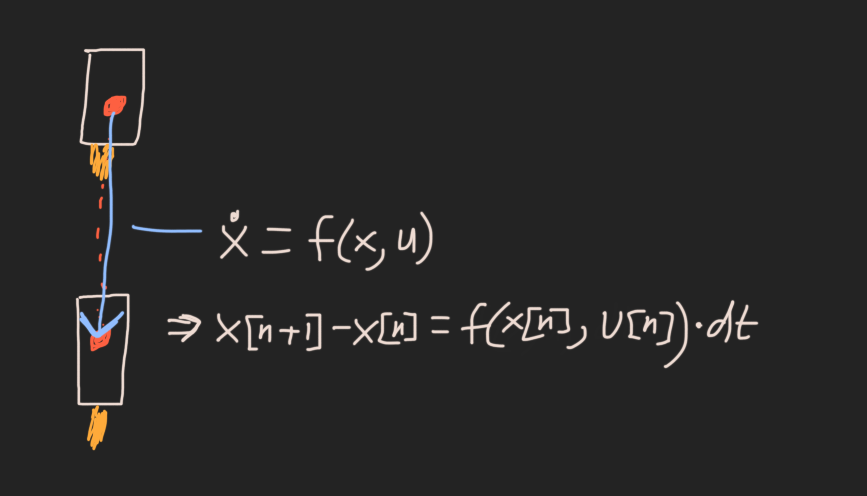
x [n + 1] -x [n] = f(x [n],u [n])* dt當(dāng)前狀態(tài)+導(dǎo)數(shù)* dt。(注意:我在代碼中使用x_dot()而不是f(),因為我認為它更易于閱讀)。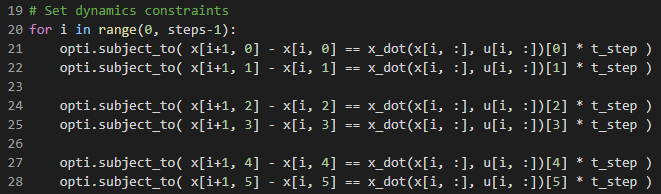
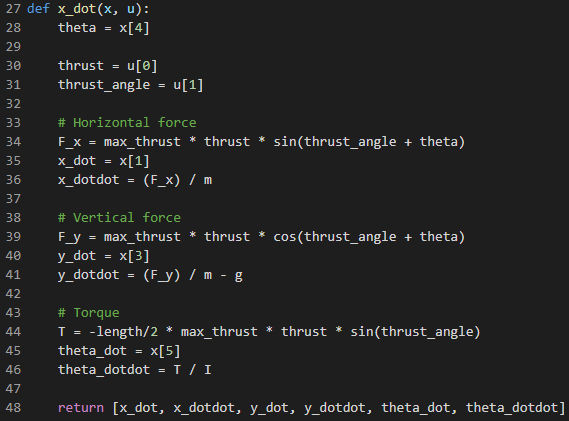
g = 9.8 m = 100000公斤(猜測濕重和干重之間的一個很好的舍入數(shù)。實際上,當(dāng)您使用燃料時,這種情況會發(fā)生變化,但出于準確性考慮,我只是為了簡單起見) 長度= 50米 I =(1/12)* m *長度2(均勻桿的慣性)

opti.solve(),然后將其轉(zhuǎn)換為Ipopt(開放源代碼優(yōu)化求解器)可以理解的問題。希望此消息應(yīng)該到達大量迭代打印的底部:
http://larsblackmore.com/
點擊下方閱讀原文加入社區(qū)會員
評論
圖片
表情