
【深度學習】詳解對象檢測模型中的Anchors
作者:Raghul Asokan
編譯:ronghuaiyang
給大家再次解釋一下Anchors在物體檢測中的作用。
今天,我將討論在物體檢測器中引入的一個優(yōu)雅的概念 —— Anchors,它是如何幫助檢測圖像中的物體,以及它們與傳統(tǒng)的兩階段檢測器中的Anchor有何不同。
像往常一樣,讓我們看看在哪些問題中,anchors被引入作為解決方案。
在開始使用anchors之前,讓我們看看兩階段物體檢測器是如何工作的,以及它們實際上是如何促進單階段檢測器的發(fā)展的。
兩階段物體檢測器:傳統(tǒng)的兩階段物體檢測器檢測圖像中的物體分兩階段進行:
-
第一階段:第一階段遍歷輸入圖像和物體可能出現的輸出區(qū)域(稱為建議區(qū)域或感興趣的區(qū)域)。這個過程可以通過外部算法(例如:selective search)或者神經網絡來完成。 -
第二階段:第二階段是一個神經網絡,它接受這些感興趣的區(qū)域,并將其分類到一個目標物體類中。
為了簡單起見,我會介紹一個著名的兩級探測器 —— Faster-RCNN。兩個階段都包含了一個神經網絡。
-
第一個神經網絡預測一個物體可能出現的位置(也稱為objectness得分)。它基本上就是一個對前景(物體)和背景的分類。這個網絡被稱為區(qū)域建議網絡,又名RPN。 -
提取區(qū)域建議后,對輸入圖像中對應的位置進行裁剪,送入下一個神經網絡進行分類,假設有N個目標類。這個網絡預測在那個位置上存在什么物體。
步驟2看起來非常簡單,因為它可以歸結為圖像分類,即將目標物體分成N個類別中的一個。
讓我們深入研究第1步。
(a) 這個神經網絡如何預測這些目標的位置?
(b) 如果可以訓練神經網絡進行前景和背景的分類,那么為什么不訓練它一次預測所有N個類呢?
(a) 的解決方案就是anchors,(b)的答案是肯定的,我們可以用一個單一的網絡來執(zhí)行N-way目標檢測,這樣的網絡就是眾所周知的單階段目標檢測器。單階段檢測器與Faster-RCNN中第一個階段的網絡幾乎相同。
我說SSD和RPN幾乎是一樣的,因為它們在概念上是相同的,但是在體系結構上有不同。
問題:神經網絡如何檢測圖像中的物體?
解決方案(1) —— 單目標檢測:讓我們使用最簡單的情況,在一個圖像中找到一個單一的物體。給定一個圖像,神經網絡必須輸出物體的類以及它的邊界框在圖像中的坐標。所以網絡必須輸出4+C個數字,其中C是類別的數量。
可以直接將輸入圖像通過一組卷積層然后將最后的卷積輸出轉換為一個4+C維的向量,其中,前4個數字表示物體的位置(比如minx, miny, maxx, maxy),后面的C個數字表示類別概率的得分。
解決方案(2) —— 多目標檢測:這可以通過將上述方法擴展為N個物體來實現。因此,網絡現在輸出的不是4+C的數字,而是*N*(4+C)*數字。
取一個大小為H x W x 3的輸入圖像讓它通過一組卷積層得到一個大小為H x W x d的卷積體,d是通道的深度或數量。
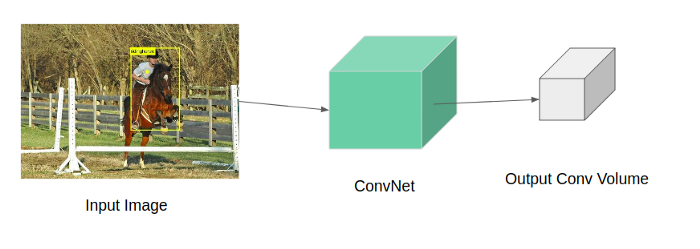
考慮上面的輸出卷積 volume。假設volume大小為7×7×512。使用N個大小為3 x 3 x 512的濾波器,stride=2, padding=1,產生大小為4 x 4 x N的輸出volume。
我們取這個大小為4 x 4 x N的輸出試著推斷它的含義。
在輸出的特征圖中有16個cells,我們可以說,每個cell都有一個接收域(或感受野),對應到原始圖像中的某個點。每個這樣的cell都有N個與之相關的數字。正如我前面指出的,N是類別的數量,我們可以說,每個cell都有關于在feature map中對應位置上出現的物體的信息。以同樣的方式,還有另一個并行的conv頭,其中有4個大小為3 x 3 x 512的濾波器,應用在同一個conv volume上,以獲得另一個大小為4 x 4 x 4的輸出 —— 這對應邊界框的偏移量。
現在我們知道如何用一個神經網絡來預測多個目標。但是等一下,我們如何計算這個輸出為4x4xn的cell的損失呢?
現在讓我們深入到輸出層使用的N個濾波器中。從N個濾波器中取出一個,看看它是如何通過對feature map進行卷積得到輸出的。
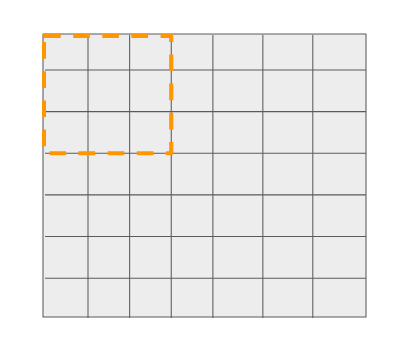
這個3x3的濾波器可以在7x7的網格上移動16個不一樣的位置,并做出預測(如前所述),這是非常明顯的。
我們知道,網格中的16個cell對應于它之前的層中的一個特定位置。請看下面的圖表。輸出網格中的第一個cell有一個大小為3x3的參考框。
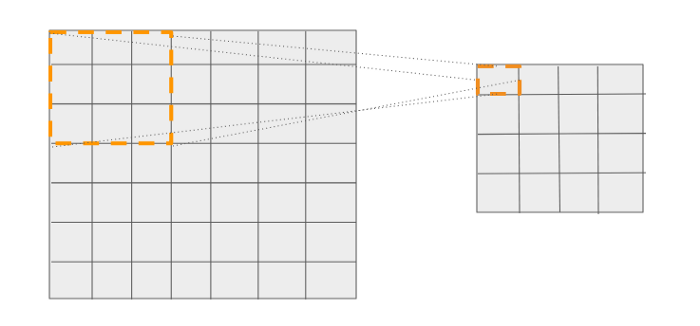
第一個cell可以與輸入圖像中的特定位置相關聯,從該位置進行預測。
類似地,輸出中的每個cell都可以與輸入圖像中的特定位置相關聯,從該位置進行預測。
因此有16個這樣的參考位置(大小為3x3) —— 每個位置都有自己相對于輸入圖像的坐標。現在通過這些參考位置,我們可以實現兩個目標:
-
分類損失:如果N個物體中有一個落在這16個參考位置,即與ground truth的包圍框的IOU≥某個閾值,那么我們就知道要匹配哪個ground truth了。 -
回歸損失:為什么我們需要這個?假設一個物體落在其中一個參考框中,我們可以簡單地輸出這些參考位置相對于輸入圖像的實際坐標。原因是物體不必是方形的。因此,我們不是天真地輸出一組固定的框坐標,而是通過輸出4個偏移值來調整這些參考位置的默認坐標。現在我們已經知道了ground truth box坐標和相應的參考位置坐標,我們可以簡單地使用L1/L2距離來計算回歸損失。
與圖像分類的任務中只有輸出向量要匹配不同,這里我們有16個參考位置要匹配。這意味著該網絡可以一次性預測16個物體。要預測的物體數量可以通過對多特征圖層次進行預測或通過增加特征圖上所謂的參考位置來增加。
這些參考位置就是anchor boxes或者default boxes。
在上面的例子中,只有一個anchor框,也就是每個濾波器位置只做了一個預測。
通常,在feature map中,每個filter位置都可以進行多次預測 —— 這意味著需要有多少預測就有多少個參考。
假設每個filter位置有3個參考。
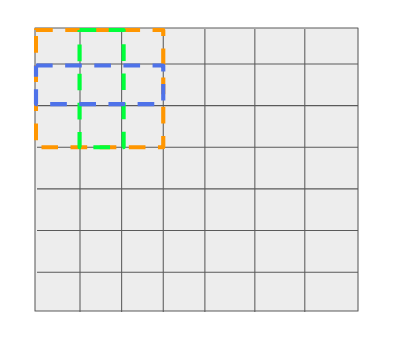
正如我們前面看到的,輸出是anchor框的函數,因此如果參考/anchor的數量改變,輸出的大小也會改變。因此,網絡輸出的不是1個anchor點的4x4xN(和4x4x4),而是由于anchor數=3,所以輸出的是4x4x(N*3)。
一般來說,單階段探測器的輸出形狀可以寫成:
分類頭的形狀:HxWxNA
回歸頭的形狀:HxWx4A
式中,A為使用anchrs的數量。
一個問題!
每個filter位置有多個anchors/參考框的意義是什么?
這使得網絡能夠在圖像的給每個位置上預測多個不同大小的目標。
這種在末端使用卷積層來獲得輸出的單階段檢測器的變體稱為SSD,而在末端使用全連接層來獲得輸出的變體稱為YOLO。
我希望我已經把anchor的概念變得為大家容易理解。anchor總是一個難以把握的概念,在這個博客中仍然有一些關于anchor的未解問題。我想在接下來的文章中回答這些問題。到時候見:)
往期精彩回顧
適合初學者入門人工智能的路線及資料下載 (圖文+視頻)機器學習入門系列下載 機器學習及深度學習筆記等資料打印 《統(tǒng)計學習方法》的代碼復現專輯
機器學習交流qq群772479961,加入微信群請掃碼