
OpenCV :圖像基本操作
點(diǎn)擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時間送達(dá) 
轉(zhuǎn)自:AI技術(shù)前線
01
加載圖像
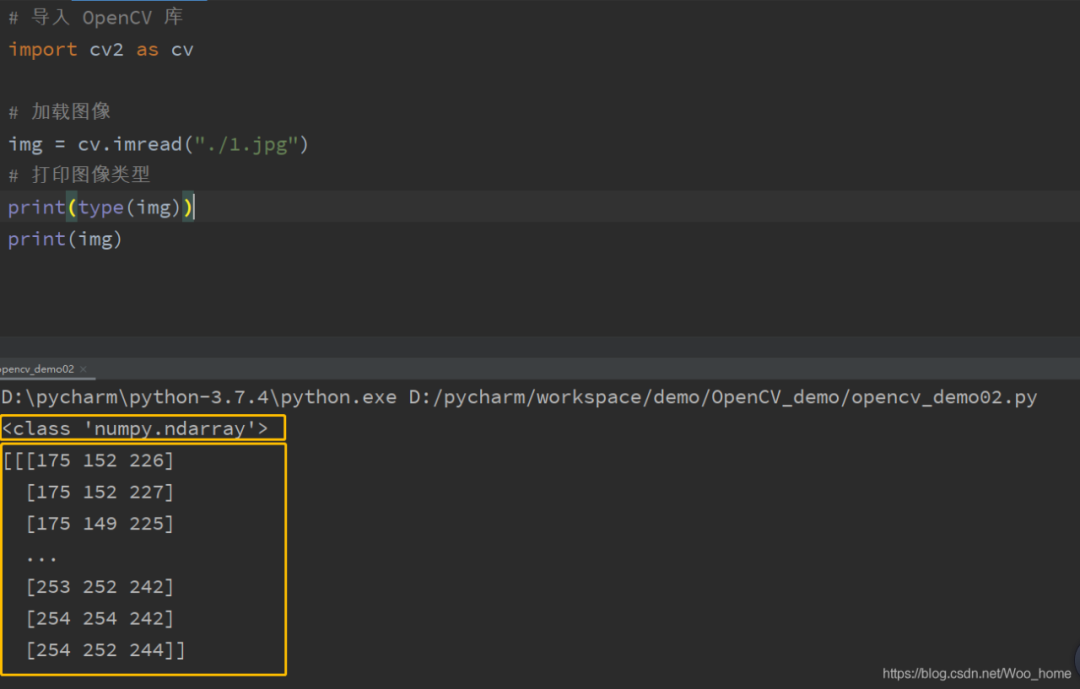
imread 功能是加載圖像文件成為一個 Mat 對象,其中第一個參數(shù)表示圖像文件名稱,第二個參數(shù)表示加載的圖像是什么類型,支持常見的三個參數(shù)值
IMREAD_UNCHANDED(<0) 表示加載原圖,不做任何改變
IMREAD_GRAYSCALE(0) 表示吧原圖作為灰度圖像加載進(jìn)來
IMREAD_COLOR(>0) 表示把原圖作為 RGB 圖像加載進(jìn)來
# 導(dǎo)入 OpenCV 庫import cv2 as cv# 加載圖像img = cv.imread("./1.jpg")# 打印圖像類型print(type(img))print(img)
圖像顯示
# 導(dǎo)入 OpenCV 庫import cv2 as cv
# 加載圖像img = cv.imread("./1.jpg")
# 圖像的顯示,也可以創(chuàng)建多個窗口cv.imshow("image",img)
# 等待時間,毫秒級,0 表示任意鍵終止cv.waitKey(0)cv.destroyAllWindows()

數(shù)據(jù)讀取-圖像
# 導(dǎo)入 OpenCV 庫import cv2 as cv
# 灰色顯示img = cv.imread("./1.jpg",cv.IMREAD_GRAYSCALE)
# 打印信息print(img)
# 導(dǎo)入 OpenCV 庫import cv2 as cv
img = cv.imread("./1.jpg",cv.IMREAD_GRAYSCALE)cv.imshow("image",img)cv.waitKey(0)cv.destroyAllWindows()

截取部分圖像數(shù)據(jù)
# 導(dǎo)入 OpenCV 庫import cv2 as cv# 加載圖像img = cv.imread("./1.jpg",)# 截取部分圖像cat = img[0:200, 0:200]# 顯示截取的圖像cv.imshow("cat",cat)cv.waitKey(0)cv.destroyAllWindows()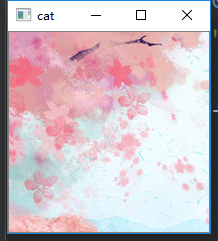
顏色通道提取
# 導(dǎo)入 OpenCV 庫import cv2 as cv
img = cv.imread("./1.jpg",)b,g,r = cv.split(img)
print(b)
# 導(dǎo)入 OpenCV 庫import cv2 as cv
img = cv.imread("./1.jpg",)cur_img = img.copy()
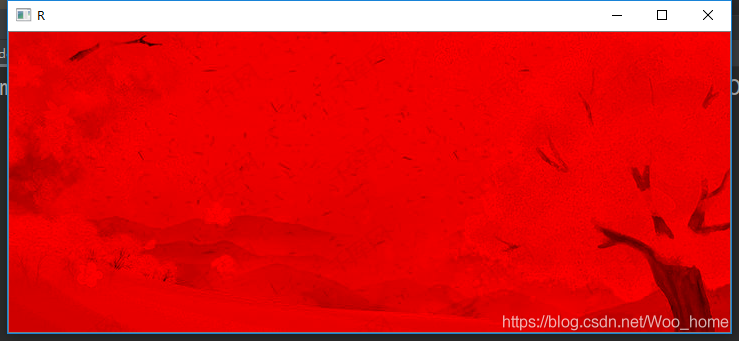
# 注意參數(shù)的變化cur_img[:,:,0] = 0cur_img[:,:,1] = 0cv.imshow('R',cur_img)cv.waitKey(0)cv.destroyAllWindows()
# 導(dǎo)入 OpenCV 庫import cv2 as cv
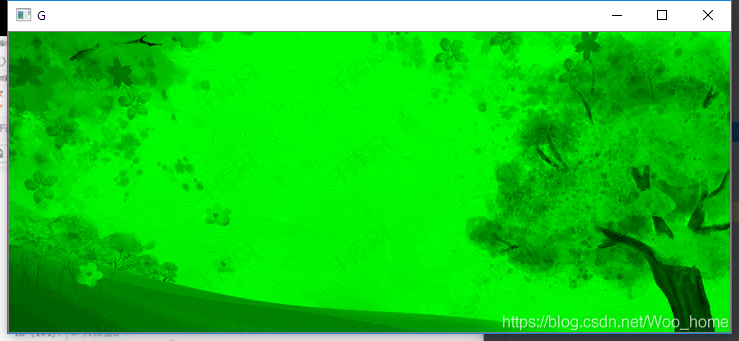
img = cv.imread("./1.jpg",)cur_img = img.copy()# 注意參數(shù)的變化cur_img[:,:,0] = 0cur_img[:,:,2] = 0cv.imshow('G',cur_img)cv.waitKey(0)cv.destroyAllWindows()
# 導(dǎo)入 OpenCV 庫import cv2 as cv
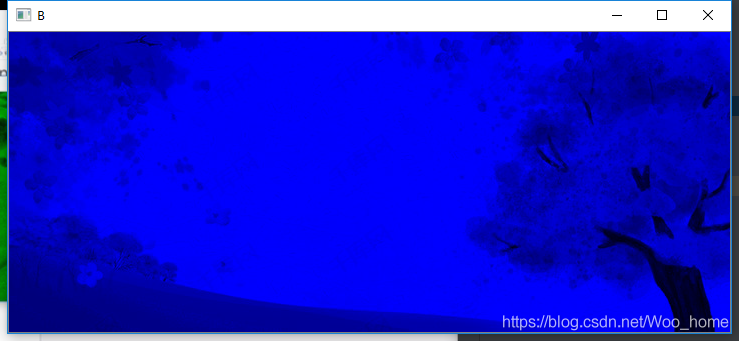
img = cv.imread("./1.jpg",)cur_img = img.copy()# 注意參數(shù)的變化cur_img[:,:,1] = 0cur_img[:,:,2] = 0cv.imshow('B',cur_img)cv.waitKey(0)cv.destroyAllWindows()
# 導(dǎo)入 OpenCV 庫import cv2 as cv# 導(dǎo)入 maplotlibimport matplotlib.pyplot as plt
img = cv.imread("./1.jpg",)# 定義圖片顯示大小top_size,buttom_size,left_size,right_size = (50,50,50,50)# 復(fù)制法,也就是復(fù)制最邊緣像素replicate = cv.copyMakeBorder(img,top_size,buttom_size,left_size,right_size,borderType=cv.BORDER_REPLICATE)
# 反射法,對感興趣的圖像中的像素在兩邊進(jìn)行復(fù)制例如:fedcbajabcdefghjhgfedcbreflect = cv.copyMakeBorder(img,top_size,buttom_size,left_size,right_size,borderType=cv.BORDER_REFLECT)# 反射法,也就是以最邊緣像素為軸、對稱、gfedcbjabcdefghigfedcbareflect01 = cv.copyMakeBorder(img,top_size,buttom_size,left_size,right_size,borderType=cv.BORDER_REFLECT_101)# 外包裝法 cdeifghjabcdefghjabcdefgwrap = cv.copyMakeBorder(img,top_size,buttom_size,left_size,right_size,borderType=cv.BORDER_WRAP)# 常量法,常數(shù)值填充constant = cv.copyMakeBorder(img,top_size,buttom_size,left_size,right_size,borderType=cv.BORDER_CONSTANT)# 設(shè)置圖像位置plt.subplot(231)# 設(shè)置圖像顯示plt.imshow(img,'gray')# 設(shè)置標(biāo)題plt.title('ORIGINAL')
plt.subplot(232)plt.imshow(replicate,'gray')plt.title("REPLICATE")
plt.subplot(233)plt.imshow(reflect,'gray')plt.title("REFLECT")
plt.subplot(234)plt.imshow(reflect01,'gray')plt.title("REPLICATE01")
plt.subplot(235)plt.imshow(wrap,'gray')plt.title("WRAP")
plt.subplot(236)plt.imshow(constant,'gray')plt.title("CONSTANT")# 圖像顯示plt.show()
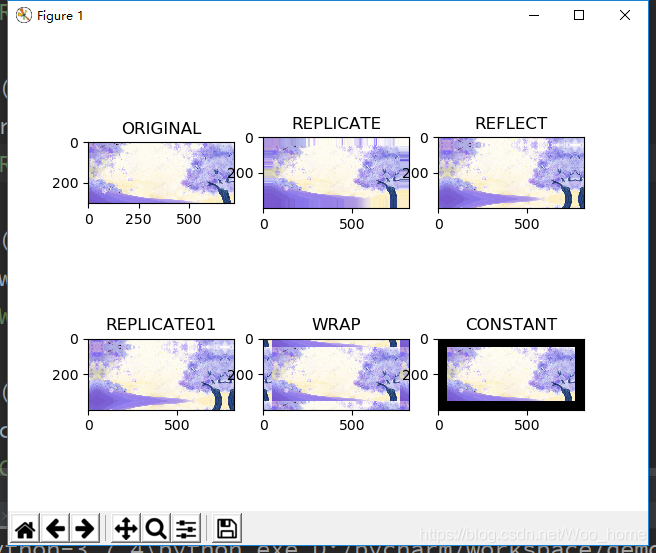
BORDER_REPLICATE :復(fù)制法,也就是復(fù)制最邊緣像素
BORDER_REFLECT :反射法,對感興趣的圖像中的像素在兩邊進(jìn)行復(fù)制例如:fedcbajabcdefghjhgfedcb(這里我也不是很明白,會的朋友請?jiān)谠u論區(qū)解釋下,感謝)
BORDER_REFLECT_101 :反射法,也就是以最邊緣像素為軸、對稱、gfedcbjabcdefghigfedcba
BORDER_WRAP :外包裝法 cdeifghjabcdefghjabcdefg
BORDER_CONSTANT :常量法,常數(shù)值填充
數(shù)值計(jì)算
import cv2 as cv
img = cv.imread("./1.jpg")
img2 = img + 10img[:5,:,0]
print(img)print("--------------------------")print(img2)
圖像融合
import cv2 as cv
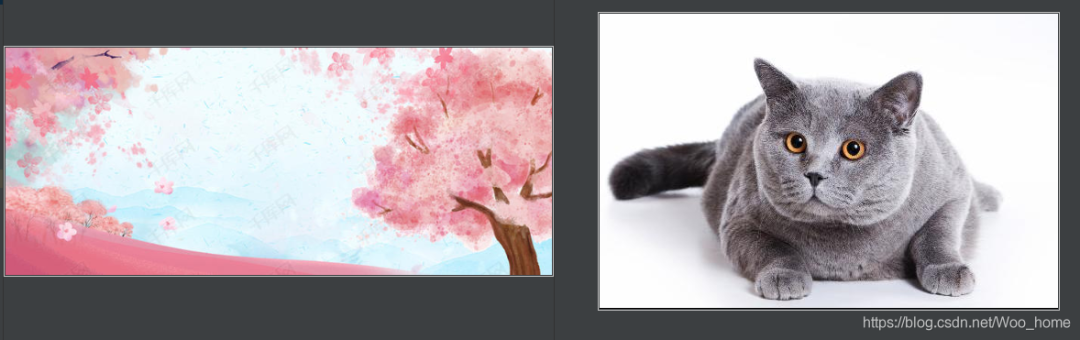
img = cv.imread("./1.jpg")img_cat = cv.imread("./2.jpg")
result = img + img_catprint(result)

import cv2 as cv
img = cv.imread("./1.jpg")img_cat = cv.imread("./2.jpg")
print(img.shape)print(img_cat.shape)
import cv2 as cv
img = cv.imread("./1.jpg")img_cat = cv.imread("./2.jpg")print(img.shape)# 設(shè)置與 img 一樣的數(shù)值img_cat = cv.resize(img_cat,(721,300))print(img_cat.shape)
import cv2 as cvimport matplotlib.pyplot as plt
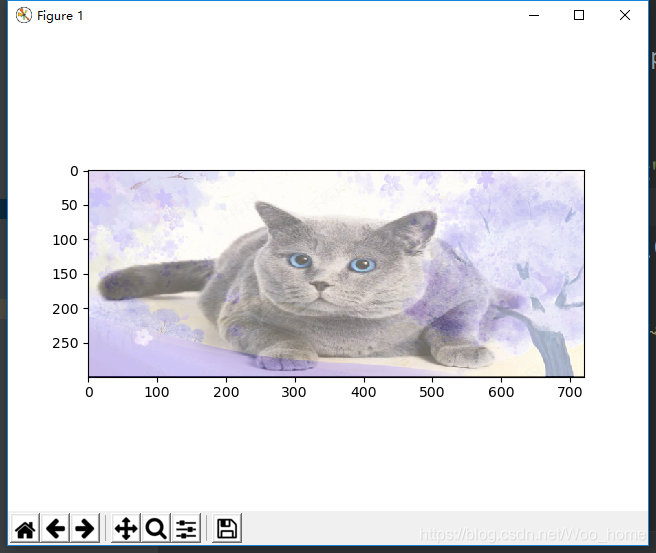
img = cv.imread("./1.jpg")img_cat = cv.imread("./2.jpg")# 設(shè)置與 img 一樣的數(shù)值img_cat = cv.resize(img_cat,(721,300))# 設(shè)置寬度值res = cv.addWeighted(img,0.4,img_cat,0.6,0)
# 圖像顯示plt.imshow(res)plt.show()
圖像保存
# 導(dǎo)入 OpenCV 庫import cv2 as cv# 讀取圖像img = cv.imread("./1.jpg",cv.IMREAD_GRAYSCALE)# 圖像保存# 第一個參數(shù)是圖像要保存的路徑,第二個圖像是要保存的圖像cv.imwrite("./demo.jpg",img)

數(shù)據(jù)讀取-視頻
video = cv2.VideoCapture("demo.mp4")
# 檢查是否打開正確if video.isOpened(): # 我們都知道視頻和游戲其實(shí)都是由圖像組成的,通過訪問圖像的幀數(shù)連貫形成的,這里也是一樣 # video.read() 一幀一幀地讀取 # open 得到的是一個布爾值,就是 True 或者 False # frame 得到當(dāng)前這一幀的圖像 open, frame = video.read()else: open = False
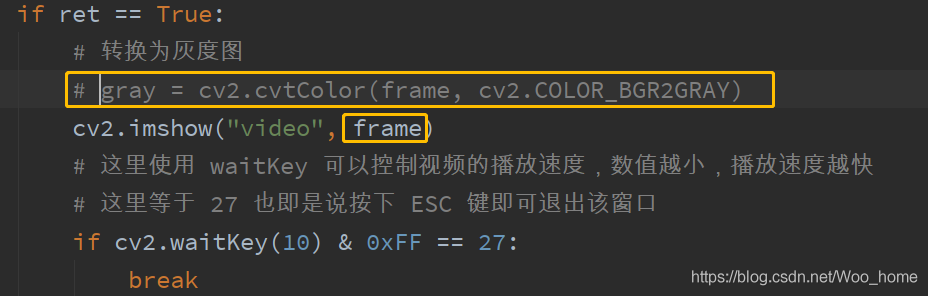
while open: ret, frame = video.read() # 如果讀到的幀數(shù)不為空,那么就繼續(xù)讀取,如果為空,就退出 if frame is None: break if ret == True: # 轉(zhuǎn)換為灰度圖 gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) cv2.imshow("video",gray) # 這里使用 waitKey 可以控制視頻的播放速度,數(shù)值越小,播放速度越快 # 這里等于 27 也即是說按下 ESC 鍵即可退出該窗口 if cv2.waitKey(10) & 0xFF == 27: breakvideo.release()cv2.destroyAllWindows()
import cv2
video = cv2.VideoCapture("./demo.mp4")
# 檢查是否打開正確if video.isOpened(): # 我們都知道視頻和游戲其實(shí)都是由圖像組成的,通過訪問圖像的幀數(shù)連貫形成的,這里也是一樣 # video.read() 一幀一幀地讀取 # open 得到的是一個布爾值,就是 True 或者 False # frame 得到當(dāng)前這一幀的圖像 open, frame = video.read()else: open = False
while open: ret, frame = video.read() # 如果讀到的幀數(shù)不為空,那么就繼續(xù)讀取,如果為空,就退出 if frame is None: break if ret == True: # 轉(zhuǎn)換為灰度圖 gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) cv2.imshow("video",gray) # 這里使用 waitKey 可以控制視頻的播放速度,數(shù)值越小,播放速度越快 # 這里等于 27 也即是說按下 ESC 鍵即可退出該窗口 if cv2.waitKey(10) & 0xFF == 27: breakvideo.release()cv2.destroyAllWindows()
注釋掉設(shè)置灰色的部分
將原視頻顯示在窗口上
本文僅做學(xué)術(shù)分享,如有侵權(quán),請聯(lián)系刪文。
下載1:OpenCV-Contrib擴(kuò)展模塊中文版教程
在「小白學(xué)視覺」公眾號后臺回復(fù):擴(kuò)展模塊中文教程,即可下載全網(wǎng)第一份OpenCV擴(kuò)展模塊教程中文版,涵蓋擴(kuò)展模塊安裝、SFM算法、立體視覺、目標(biāo)跟蹤、生物視覺、超分辨率處理等二十多章內(nèi)容。
下載2:Python視覺實(shí)戰(zhàn)項(xiàng)目52講
在「小白學(xué)視覺」公眾號后臺回復(fù):Python視覺實(shí)戰(zhàn)項(xiàng)目,即可下載包括圖像分割、口罩檢測、車道線檢測、車輛計(jì)數(shù)、添加眼線、車牌識別、字符識別、情緒檢測、文本內(nèi)容提取、面部識別等31個視覺實(shí)戰(zhàn)項(xiàng)目,助力快速學(xué)校計(jì)算機(jī)視覺。
下載3:OpenCV實(shí)戰(zhàn)項(xiàng)目20講
在「小白學(xué)視覺」公眾號后臺回復(fù):OpenCV實(shí)戰(zhàn)項(xiàng)目20講,即可下載含有20個基于OpenCV實(shí)現(xiàn)20個實(shí)戰(zhàn)項(xiàng)目,實(shí)現(xiàn)OpenCV學(xué)習(xí)進(jìn)階。
交流群
歡迎加入公眾號讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動駕駛、計(jì)算攝影、檢測、分割、識別、醫(yī)學(xué)影像、GAN、算法競賽等微信群(以后會逐漸細(xì)分),請掃描下面微信號加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺SLAM“。請按照格式備注,否則不予通過。添加成功后會根據(jù)研究方向邀請進(jìn)入相關(guān)微信群。請勿在群內(nèi)發(fā)送廣告,否則會請出群,謝謝理解~