
關(guān)于卡爾曼及卡爾曼增益的理解【精】
點(diǎn)擊下方卡片,關(guān)注“新機(jī)器視覺”公眾號(hào)
視覺/圖像重磅干貨,第一時(shí)間送達(dá)
提到卡爾曼,不得不說一個(gè)故事:
片綠油油的草地上有一條曲折的小徑,通向一棵大樹。一個(gè)要求被提出:從起點(diǎn)沿著小徑走到樹下。
“很簡單。” A說,于是他絲毫不差地沿著小徑走到了樹下。
現(xiàn)在,難度被增加了:蒙上眼。
“也不難,我當(dāng)過特種兵。” B說,于是他歪歪扭扭地走到了樹旁。“唉,好久不練,生疏了。” (只憑自己的預(yù)測(cè)能力)
“看我的,我有 DIY 的 GPS!” C說,于是他像個(gè)醉漢似地歪歪扭扭的走到了樹旁。“唉,這個(gè) GPS 沒做好,漂移太大。”(只依靠外界有很大噪聲的測(cè)量)
“我來試試。” 旁邊一也當(dāng)過特種兵的拿過 GPS, 蒙上眼,居然沿著小徑很順滑的走到了樹下。(自己能預(yù)測(cè)+測(cè)量結(jié)果的反饋)
“這么厲害!你是什么人?”
“卡爾曼 ! ”
“卡爾曼?!你就是卡爾曼?”
眾人大吃一驚。
“我是說這個(gè) GPS 卡而慢。
總結(jié)就是預(yù)測(cè)+測(cè)量更新。
卡爾曼濾波的測(cè)量更新部分是由最小二乘推導(dǎo)而來。
今天主要說明卡爾曼增益的Kt如何去理解?
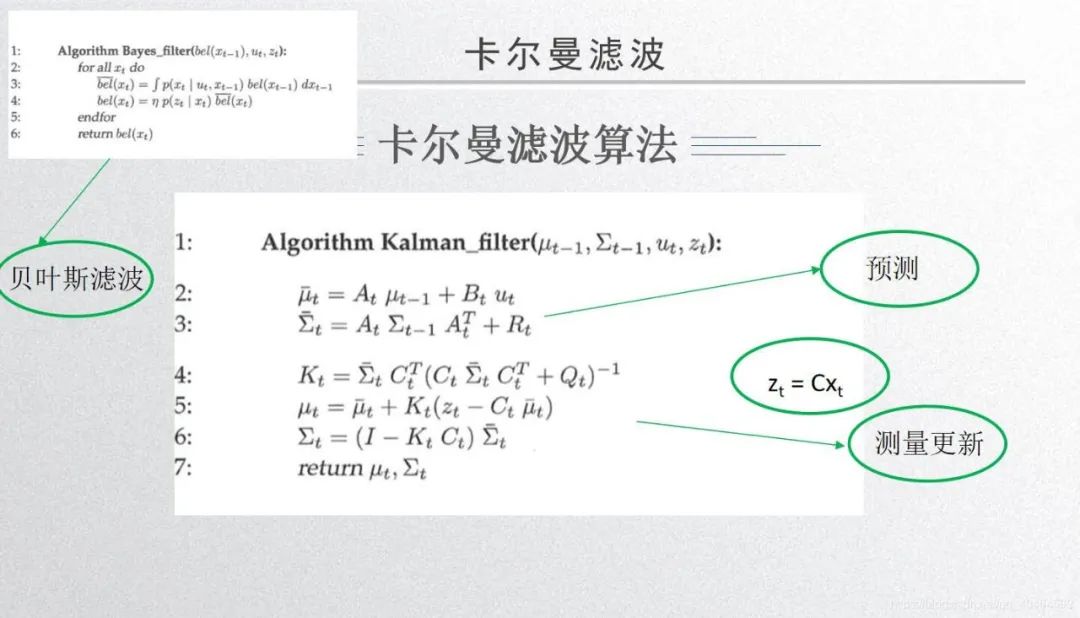
卡爾曼主要來處理如下兩個(gè)來源的數(shù)據(jù):
(1)根據(jù)模型來預(yù)測(cè)出的數(shù)據(jù)。(預(yù)測(cè))
(2)傳感器觀測(cè)到的數(shù)據(jù)。(觀測(cè))
核心:
K越小越相信你的預(yù)測(cè)(1)中的估計(jì),
K越大越相信你的觀測(cè)(2)中的觀測(cè)。
K的值和傳感器的精度有關(guān)。依賴于按個(gè)傳感器更缺。
我們從另一個(gè)角度理解卡爾曼濾波算法,假設(shè)你的傳感器和預(yù)測(cè)模型的噪聲均滿足正高斯正態(tài)分布,看下面圖片:
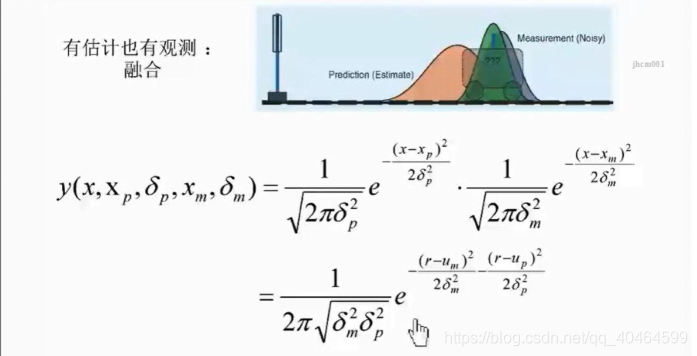
顯然你可以看到兩個(gè)正態(tài)分布相乘,帶P下墜的代表預(yù)測(cè)滿足的噪聲正態(tài)分布,帶m下標(biāo)的表示是傳感器測(cè)量噪聲所滿足的正態(tài)分布。這兩個(gè)預(yù)測(cè)和測(cè)量是獨(dú)立事件。
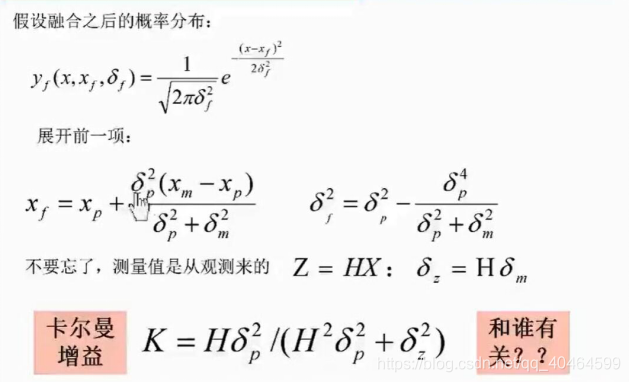
整理后得到上述的式子。我們會(huì)得到如下分析:
(1)δp越大時(shí),k越大,這樣對(duì)于預(yù)測(cè)來說它的噪音的不確定性變大,所以我們相信更傳感器的測(cè)量值
(2) δp越小的時(shí)候,k越小,這樣對(duì)于預(yù)測(cè)來說它的噪音不確定性變小,所以我們更相信預(yù)測(cè)的值。
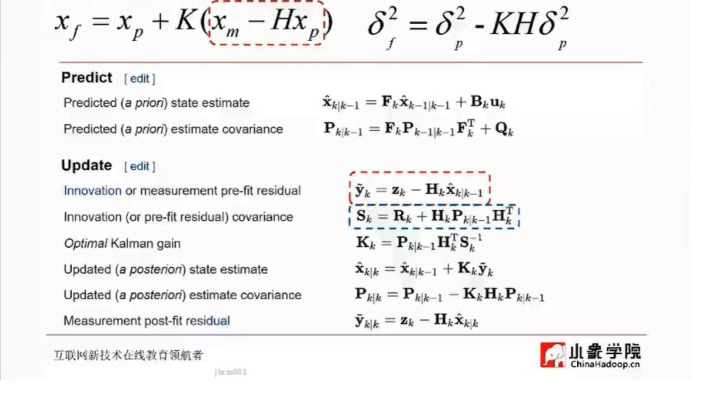
現(xiàn)在,我們把一維推廣到高維,用矩陣表示:
比如高維情況下卡爾曼增益K=P*Ht*(R+HPHt)(圖中綠框地方),這個(gè)式子與正好對(duì)應(yīng)。

P是預(yù)測(cè)的方差,H是觀測(cè)矩陣,R是傳感器測(cè)量滿組方差。其余也是一一對(duì)應(yīng)的。
版權(quán)聲明:本文為CSDN博主「Jack Ju」的原創(chuàng)文章,遵循CC 4.0 BY-SA版權(quán)協(xié)議,轉(zhuǎn)載請(qǐng)附上原文出處鏈接及本聲明。
原文鏈接:
https://blog.csdn.net/qq_40464599/article/details/108106552
編輯:古月居
聲明:部分內(nèi)容來源于網(wǎng)絡(luò),僅供讀者學(xué)習(xí)、交流之目的。文章版權(quán)歸原作者所有。如有不妥,請(qǐng)聯(lián)系刪除。