
基于自適應(yīng)顯著性的圖像分割(源碼開(kāi)放)
點(diǎn)擊上方“小白學(xué)視覺(jué)”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)

本文介紹算法的源碼在github上給出
https://github.com/TimChinenov/GraspPicture
成產(chǎn)品及系統(tǒng)平臺(tái)的現(xiàn)場(chǎng)演示,編寫(xiě)技術(shù)應(yīng)用服務(wù)方案等,編寫(xiě)投標(biāo)類(lèi)方案文件及標(biāo)書(shū)的制作;
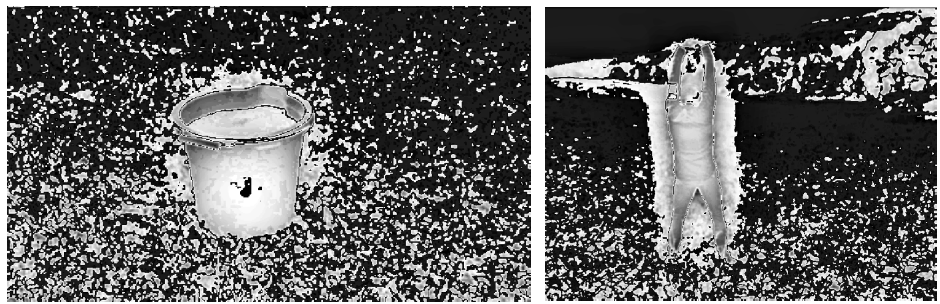
通常,當(dāng)我們看到一張圖片時(shí),會(huì)在圖片中聚焦一個(gè)焦點(diǎn)。這個(gè)可能是一個(gè)人,一座建筑物甚至是一個(gè)桶。其他沒(méi)有聚焦區(qū)域雖然很清晰,但是卻由于顏色單調(diào)或者紋理較為平滑而很少引起關(guān)注。當(dāng)遇到此類(lèi)圖象時(shí),我們希望從圖像中分割感興趣的對(duì)象。下面給出了顯著圖像的示例,本文探討了此類(lèi)顯著圖像的分割方法,也稱(chēng)為顯著性的圖像分割。
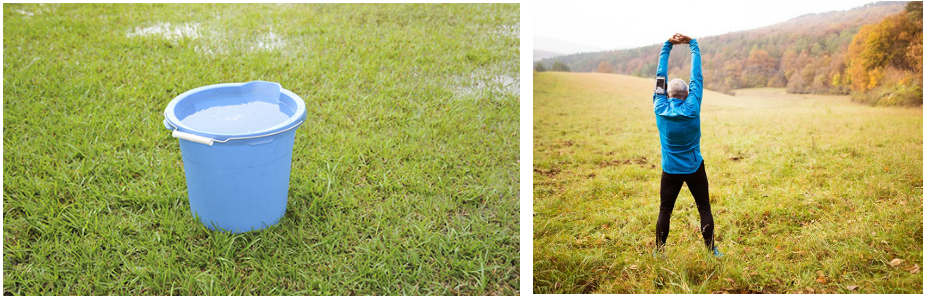
顯著圖像的示例。桶(左)和人(右)是感興趣的對(duì)象
這中分割方式最開(kāi)始起源于希望能夠自主尋找圖像中的Trimap。Trimap是圖像掩碼(mask),當(dāng)與掩碼算法配合使用時(shí),可用于分割圖像,同時(shí)能夠提示前景和背景之間的細(xì)節(jié)。Trimap通常包含定義前景的白色區(qū)域,定義背景的黑色區(qū)域以及代表不確定區(qū)域的灰色區(qū)域。具體形式如下圖所示。
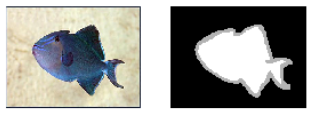
Trimap示例
大部分摳圖算法問(wèn)題在于,他們希望Trimap由用戶(hù)提供,這是一項(xiàng)非常耗時(shí)的任務(wù)。這里面介紹兩個(gè)試圖解決自主trimap生成問(wèn)題的相關(guān)論文,這兩篇論文在文末給出。在第一篇論文中使用了一種相當(dāng)簡(jiǎn)單且易于實(shí)現(xiàn)的方法。不幸的是,他們的方法并不是完全自主的,因?yàn)樗笥脩?hù)為Grabcut算法提供一個(gè)矩形區(qū)域。第二篇論文中,使用顯著性方法預(yù)測(cè)感興趣的區(qū)域。但是,它們的顯著性方法非常復(fù)雜,將三種不同的顯著性算法的結(jié)果結(jié)合在一起。這三種算法中有一種利用卷積神經(jīng)網(wǎng)絡(luò),為了易于實(shí)現(xiàn),應(yīng)該盡量避免這種技術(shù)。
如果忽略需要人為給出矩形區(qū)域,第一篇論文中能夠產(chǎn)生較好的分割結(jié)果。通過(guò)第二篇論文的原理去自動(dòng)給出一個(gè)Grabcut算法的矩形區(qū)域,那么將完美的解決自主分割的問(wèn)題。
對(duì)于大多數(shù)形式的圖像分割,目標(biāo)都是將圖像二值化為感興趣的區(qū)域。這個(gè)本文介紹方法的目標(biāo)也是這樣的。首先,大致確定感興趣的對(duì)象在哪里。將高斯模糊應(yīng)用于圖像,之后在模糊圖像中生成平均15像素大小的超像素。超像素算法旨在根據(jù)像素區(qū)域中值的顏色和距離來(lái)分解圖像。具體來(lái)說(shuō),使用了簡(jiǎn)單的線性迭代聚類(lèi)(SLIC)算法。具體形式如下圖所示。
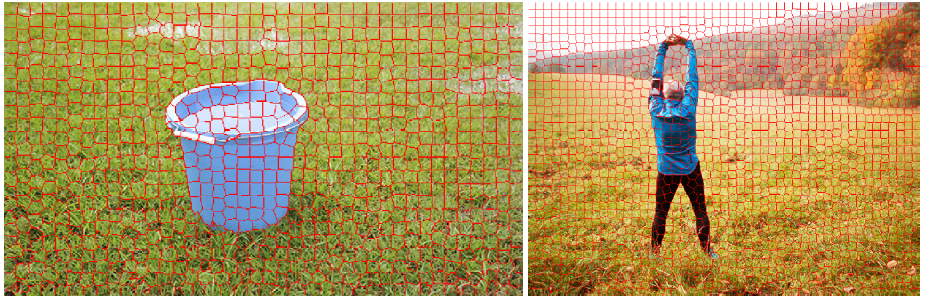
一個(gè)桶和一個(gè)人的超像素劃分結(jié)果
超像素將圖像分解為大致相同的區(qū)域。這樣的一個(gè)優(yōu)點(diǎn)是,超像素允許區(qū)域的泛化。我們可以假設(shè)超像素內(nèi)的大多數(shù)像素具有相似的屬性。
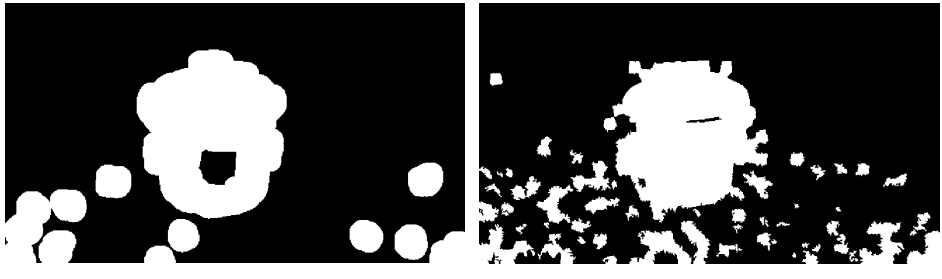
在確定圖像中的超像素的同時(shí),計(jì)算圖像的顯著性圖。使用了兩種不同的顯著性技術(shù)。第一種方法使用OpenCV內(nèi)置的方法,即所謂的細(xì)顆粒顯著性。第二種方法涉及獲取細(xì)顆粒顯著性圖像的平均值,然后從圖像的高斯模糊版本中減去平均值,然后是新圖像的絕對(duì)值。
下方的圖像均突出顯示了感興趣的區(qū)域。細(xì)顆粒顯著性產(chǎn)生的圖像較為柔和。此外,細(xì)顆粒顯著性圖像主要勾勒出突出圖像的邊界。而另一種方法雖然也捕獲了突出圖像的內(nèi)部,但是與細(xì)顆粒方法相比,該方法會(huì)產(chǎn)生更多的噪音。之后需要對(duì)噪聲進(jìn)行去除。
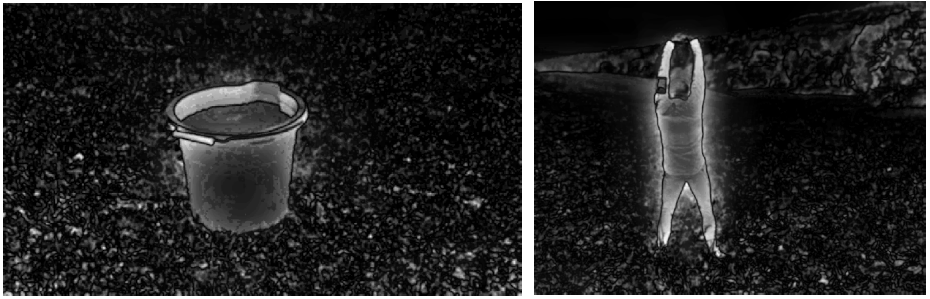
第一種顯著性結(jié)果
第二種顯著性結(jié)果
為了將圖像二值化,對(duì)從彩色圖像生成的每個(gè)超級(jí)像素進(jìn)行迭代。如果顯著圖像內(nèi)該超像素區(qū)域的中值像素值大于閾值T1,則整個(gè)超像素將被二值化為白色。否則,整個(gè)超像素將保留為黑色。T1由用戶(hù)選擇,一般情況下,將T1設(shè)置為顯著圖像中最大像素值的25%-30%。
在對(duì)圖像進(jìn)行二值化之后,基于所使用的顯著性技術(shù)對(duì)圖像進(jìn)行擴(kuò)張。在第一種方法中,將圖像放大為平均超像素尺寸的兩倍。在第二種方法中沒(méi)有進(jìn)行擴(kuò)大,因?yàn)閳D像中存在的較大噪聲使擴(kuò)張風(fēng)險(xiǎn)增大。處理的結(jié)果在下面給出。
最后一步操作取決于使用的是哪種顯著性。在這兩種方法的結(jié)果中,都提取最大的白色像素區(qū)域。通過(guò)查找圖像中的輪廓并選擇面積最大的輪廓來(lái)執(zhí)行此操作,之后將邊界框擬合到所選區(qū)域。
根據(jù)一般性結(jié)果,第一種顯著性方法通常會(huì)導(dǎo)致區(qū)域碎片化。生成邊界框后,將落入該框的不屬于最大區(qū)域的所有其他白色區(qū)域添加到該框。框的邊界增加到包括這些區(qū)域。第二種顯著性方法不需要這樣做。通常,最大獲取的區(qū)域會(huì)超出期望的數(shù)量。
最后一步是將最終找到的邊界框提供給Grabcut算法。Grabcut是用于分割圖像的常用方法,該方法會(huì)將絕對(duì)是背景和前景的內(nèi)容分開(kāi)。這里面我們直接使用OpenCV的內(nèi)置Grabcut函數(shù)。處理的結(jié)果如下所示。

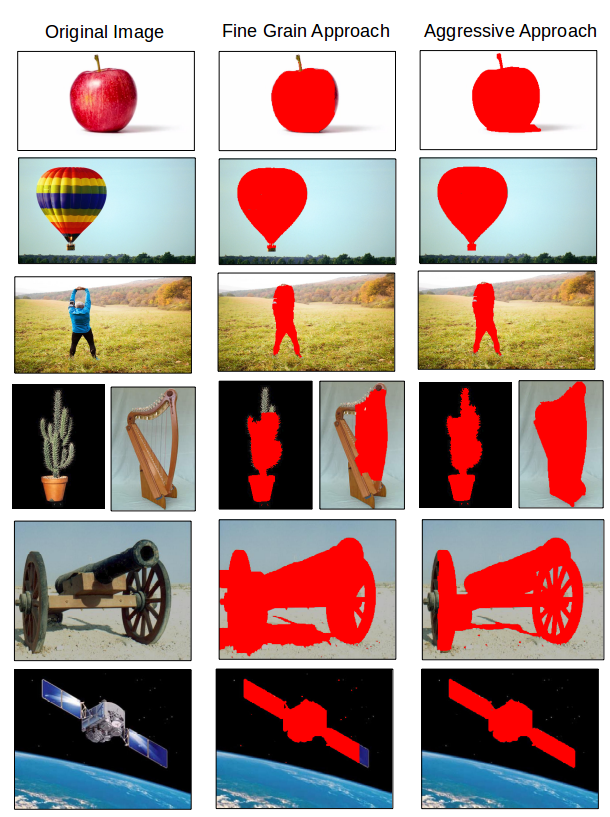
兩種顯著性計(jì)算方法對(duì)于結(jié)果會(huì)有一些影響。第一種顯著性方法更加適用于含有噪聲的圖像中,在含有噪聲的圖像中不會(huì)像第二種顯著性方法造成分割結(jié)果的溢出。,但是如果圖像太長(zhǎng)或有卷須,則這些部分通常會(huì)與圖像的其余部分?jǐn)嚅_(kāi)連接。
下面是這兩種方法分割更多圖像的示例結(jié)果。
交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺(jué)、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱(chēng)+學(xué)校/公司+研究方向“,例如:”張三?+?上海交大?+?視覺(jué)SLAM“。請(qǐng)按照格式備注,否則不予通過(guò)。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~