ECV 2021 冠軍方案解讀:渣土車識別方案

極市導(dǎo)讀
?本文為獲得渣土車識別冠軍的胡可飛團隊方案解讀,團隊選用了yolov5s網(wǎng)絡(luò)來作為此次比賽任務(wù)的檢測模型,最后優(yōu)化的模型推理速度從9FPS最高到52FPS,已具備CPU上實時推理的能力。>>加入極市CV技術(shù)交流群,走在計算機視覺的最前沿
一、賽題回顧
本賽題希望基于計算機視覺技術(shù)可以實時監(jiān)測到“黑車”,能及時、安全地管理渣土車,實現(xiàn)智能化管理,保證無“黑車”上崗,為創(chuàng)造智慧工地提供大力保障。??賽題目標(biāo)是使用計算機視覺算法對圖片中的渣土車的車牌進行識別,并且輸出車牌的文字內(nèi)容。觀察樣例數(shù)據(jù)推測圖片主要采集自交通監(jiān)控攝像頭。

比賽的評價指標(biāo)由F1 score和性能分FPS組成,這要求算法設(shè)計要兼顧精度和速度,算法的推理性能要具備實時性(>30FPS)。本賽題主要難點如下:
采集自交通攝像頭的圖片存在分辨率低,對比對低,環(huán)境光污染等問題。 部分渣土車嚴(yán)重臟污導(dǎo)致車牌難以分辨。 人工標(biāo)注存在錯標(biāo)(車牌中不應(yīng)出現(xiàn)的字符),漏標(biāo),標(biāo)準(zhǔn)不一等問題(如遮擋嚴(yán)重的車牌)。 實時性要求高。
二、算法設(shè)計
主要算法設(shè)計如下圖所示:

使用比賽數(shù)據(jù)標(biāo)注訓(xùn)練檢測模型,同時檢測渣土車目標(biāo)和車牌目標(biāo) 將車牌部分摳圖訓(xùn)練OCR識別模型 使用匈牙利算法對渣土車和車牌目標(biāo)進行匹配 對算法進行輕量化等優(yōu)化
其中檢測模型我們選用了yolov5s網(wǎng)絡(luò),該網(wǎng)絡(luò)具有較好的精度和速度的trade-off,常用于落地部署項目中。該檢測網(wǎng)絡(luò)直接使用數(shù)據(jù)標(biāo)注的渣土車和車牌類進行訓(xùn)練,同時檢出兩類目標(biāo)。最終輸出中并不需要輸出車牌框bbox,所以此處輸出的車牌bbox僅用于提取車牌內(nèi)容。
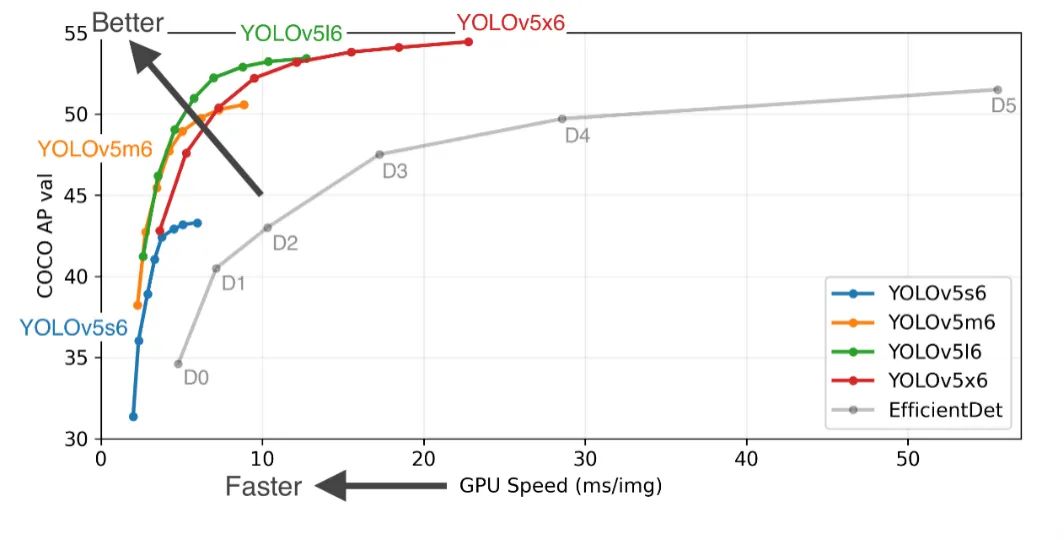
由于最終推理設(shè)備是cpu,所以對模型的輕量化要求較高,未經(jīng)優(yōu)化的yolov5s的推理速度越10FPS+,很難達到實時推理,所以我們對yolov5s網(wǎng)絡(luò)進行剪枝,方法參考了slim-yolov3,通過bn層縮放系數(shù),對模型各層的通道數(shù)進行結(jié)構(gòu)化剪枝。剪枝的原理和操作流程如下:
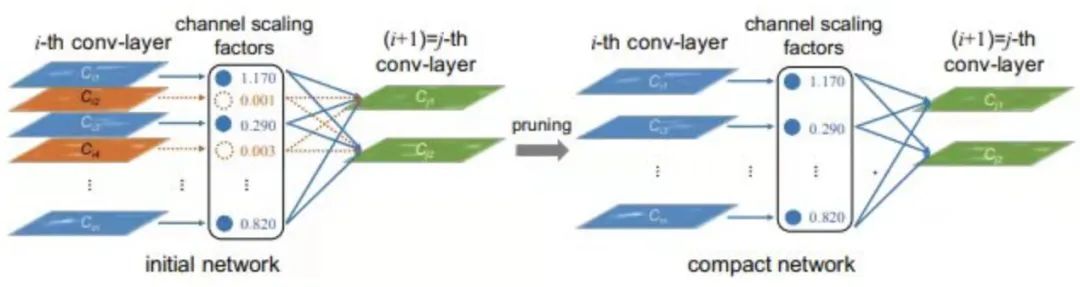
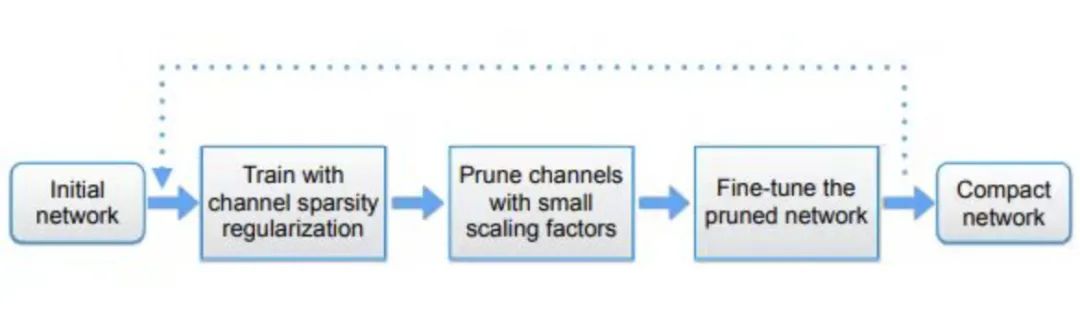
稀疏化訓(xùn)練yolov5s 由bn層scaling factor對通道數(shù)進行排序 生成8倍數(shù)通道剪枝后模型結(jié)構(gòu)config 使用剪枝后模型重新訓(xùn)練
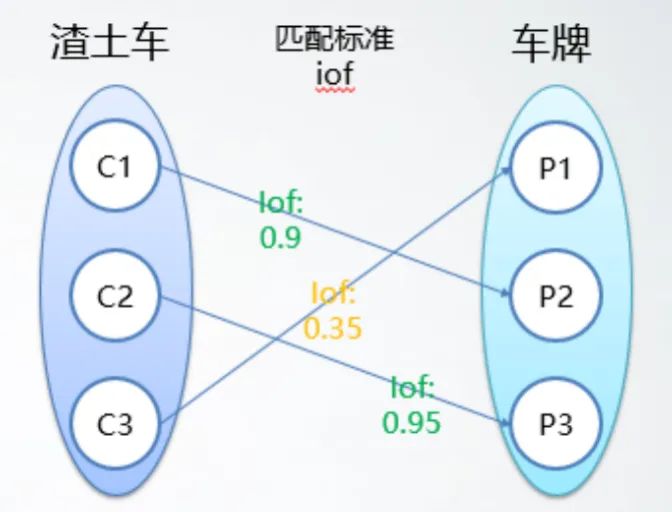
由于檢測網(wǎng)絡(luò)同時輸出渣土車和車牌的bbox,丟失了兩者的關(guān)聯(lián)關(guān)系,所以我們使用匈牙利算法對兩者進行匹配,獲得每個渣土車目標(biāo)對應(yīng)的車牌bbox。匹配的cost使用的是IoF,即Intersection over foreground,車牌即為foreground。理論上,車牌對于其所在的渣土車的IoF應(yīng)該為1,實際匹配中我們設(shè)置了一個更寬松的閾值0.8。主要處理流程如下:
Conf過濾+NMS去除誤檢框 計算渣土車目標(biāo)和車牌目標(biāo)的iof代價矩陣 使用匈牙利算法得到與渣土車匹配的車牌 刪除低質(zhì)量匹配(iof < 0.8)
OCR部分我們使用了經(jīng)典的CRNN網(wǎng)絡(luò),backbone等組成部分都選用了輕量化網(wǎng)絡(luò)結(jié)構(gòu):
MobilenetV3 RNN CTC head

因為檢測網(wǎng)絡(luò)已經(jīng)輸出了車牌bbox,且車牌bbox基本等于車牌的文字區(qū)域,考慮到算法整體的實時性要求,我們未使用專門的文字區(qū)域檢測網(wǎng)絡(luò),而是將檢測網(wǎng)絡(luò)輸出的車牌bbox直接摳圖送入OCR網(wǎng)絡(luò)進行推理。OCR的訓(xùn)練數(shù)據(jù)來自于原數(shù)據(jù)中使用車牌bbox摳圖得到的車牌圖片patch,數(shù)據(jù)的準(zhǔn)備流程如下:
Bbox jitter:對原來的bbox標(biāo)注添加隨機抖動,模擬檢測網(wǎng)絡(luò)的回歸誤差,提高泛化性,防止OCR網(wǎng)絡(luò)過擬合。 Data Cleaning:根據(jù)我國車牌的文字排列規(guī)則,對標(biāo)注錯誤的數(shù)據(jù)進行剔除等。 Data augment:通用的OCR數(shù)據(jù)增強,如旋轉(zhuǎn),HSV,模糊等。 Weighted batch sample:由于車牌文字分布不均,在數(shù)據(jù)集采樣時對出現(xiàn)頻率低的字符提高權(quán)重。
整體算法流程即上文所述方法,為了提高推理速度,我們的輕量化策略主要如下:
Openvino轉(zhuǎn)換 減小輸入圖片尺寸 檢測模型yolov5剪枝 減小CRNN中間層通道數(shù) 前后處理性能優(yōu)化
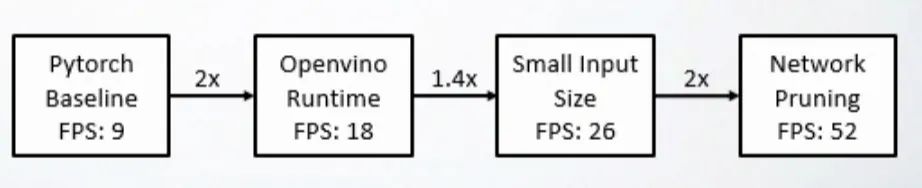
優(yōu)化后模型的推理速度從9FPS最高到52FPS,已具備CPU上實時推理的能力。
消融實驗的結(jié)果如下表:

三、總結(jié)
極市平臺的比賽提供了免費算力,并對數(shù)據(jù)進行了加密,使比賽更加公平,選手可以將更多注意力放在算法設(shè)計和優(yōu)化上。為了提高開發(fā)效率,減少bug的發(fā)生。在比賽初期,大家可以將樣例數(shù)據(jù)下載下來,在本地的設(shè)備上完成主要流程的開發(fā)后,再復(fù)制到平臺的開發(fā)環(huán)境中。
由于線上運行時觸發(fā)代碼bug,需要選手重新debug和排隊,會嚴(yán)重影響開發(fā)效率,所以代碼的debug十分重要,可以利用好logger功能,將主要信息寫入日志。
由于比賽需要兼顧性能分,算法的輕量化工作十分重要,可以通過模型選型,剪枝,量化,模型復(fù)用等方法提高推理性能。
我們設(shè)計的算法兼顧了精度和速度,可以部署落地在邊緣段設(shè)備中,但精度仍存在提升空間。
如果覺得有用,就請分享到朋友圈吧!
公眾號后臺回復(fù)“88”獲取嚴(yán)彬:STARK-
基于時空Transformer的視覺目標(biāo)跟蹤PPT下載

#?CV技術(shù)社群邀請函?#

備注:姓名-學(xué)校/公司-研究方向-城市(如:小極-北大-目標(biāo)檢測-深圳)
即可申請加入極市目標(biāo)檢測/圖像分割/工業(yè)檢測/人臉/醫(yī)學(xué)影像/3D/SLAM/自動駕駛/超分辨率/姿態(tài)估計/ReID/GAN/圖像增強/OCR/視頻理解等技術(shù)交流群
每月大咖直播分享、真實項目需求對接、求職內(nèi)推、算法競賽、干貨資訊匯總、與?10000+來自港科大、北大、清華、中科院、CMU、騰訊、百度等名校名企視覺開發(fā)者互動交流~