
綜述|計(jì)算機(jī)視覺中的注意力機(jī)制
點(diǎn)擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)

之前在看DETR這篇論文中的self_attention,然后結(jié)合之前實(shí)驗(yàn)室組會(huì)經(jīng)常提起的注意力機(jī)制,所以本周時(shí)間對(duì)注意力機(jī)制進(jìn)行了相關(guān)的梳理,以及相關(guān)的源碼閱讀了解其實(shí)現(xiàn)的機(jī)制。
一、注意力機(jī)制(attention mechanism)
attention機(jī)制可以它認(rèn)為是一種資源分配的機(jī)制,可以理解為對(duì)于原本平均分配的資源根據(jù)attention對(duì)象的重要程度重新分配資源,重要的單位就多分一點(diǎn),不重要或者不好的單位就少分一點(diǎn),在深度神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)設(shè)計(jì)中,attention所要分配的資源基本上就是權(quán)重了。
視覺注意力分為幾種,核心思想是基于原有的數(shù)據(jù)找到其之間的關(guān)聯(lián)性,然后突出其某些重要特征,有通道注意力,像素注意力,多階注意力等,也有把NLP中的自注意力引入。
二、自注意力(self-attention)
參考文獻(xiàn):http://papers.nips.cc/paper/7181-attention-is-all-you-need
參考資料:https://zhuanlan.zhihu.com/p/48508221
GitHub:https://github.com/huggingface/transformers
自注意力有時(shí)候也稱為內(nèi)部注意力,是一個(gè)與單個(gè)序列的不同位置相關(guān)的注意力機(jī)制,目的是計(jì)算序列的表達(dá)形式,因?yàn)榻獯a器的位置不變性,以及在DETR中,每個(gè)像素不僅僅包含數(shù)值信息,并且每個(gè)像素的位置信息也很重要。

所有的編碼器在結(jié)構(gòu)上都是相同的,但它們沒有共享參數(shù)。每個(gè)編碼器都可以分解成兩個(gè)子層:
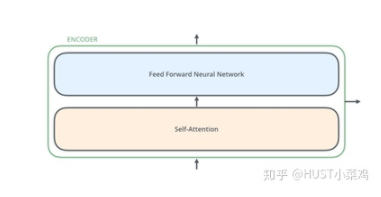
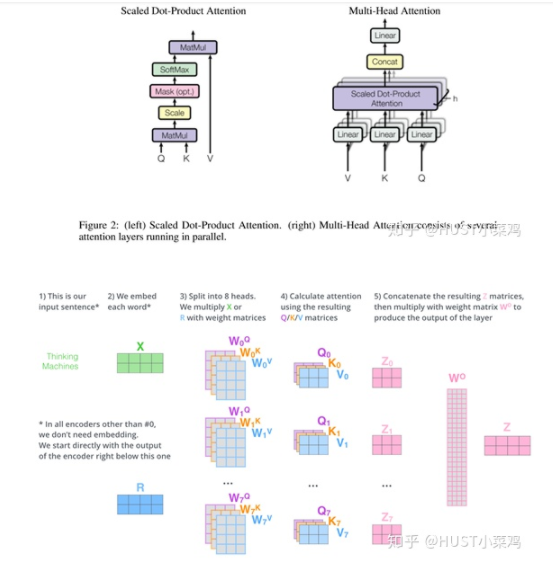
在transformer中,每個(gè)encoder子層有Multi-head self-attention和position-wise FFN組成。
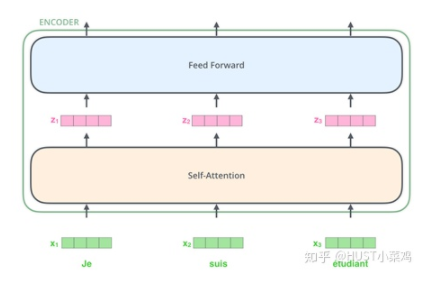
輸入的每個(gè)單詞通過嵌入的方式形成詞向量,通過自注意進(jìn)行編碼,然后再送入FFN得出一個(gè)層級(jí)的編碼。
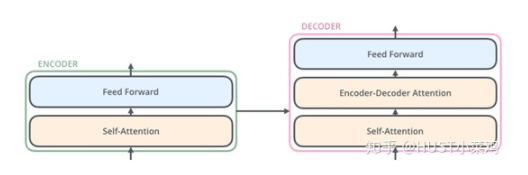
解碼器在結(jié)構(gòu)上也是多個(gè)相同的堆疊而成,在有和encoder相似的結(jié)構(gòu)的Multi-head self-attention和position-wise FFN,同時(shí)還多了一個(gè)注意力層用來關(guān)注輸入句子的相關(guān)部分。
Self-Attention
Self-Attention是Transformer最核心的內(nèi)容,可以理解位將隊(duì)列和一組值與輸入對(duì)應(yīng),即形成querry,key,value向output的映射,output可以看作是value的加權(quán)求和,加權(quán)值則是由Self-Attention來得出的。
具體實(shí)施細(xì)節(jié)如下:
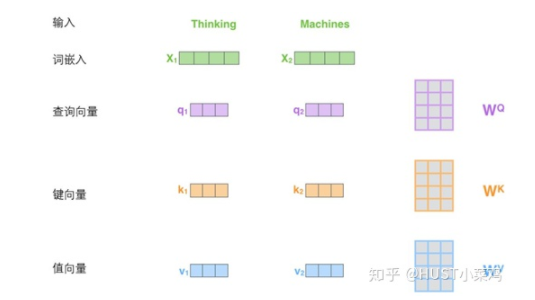
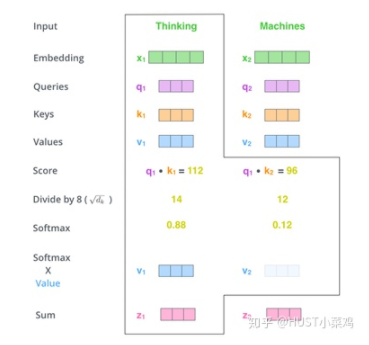
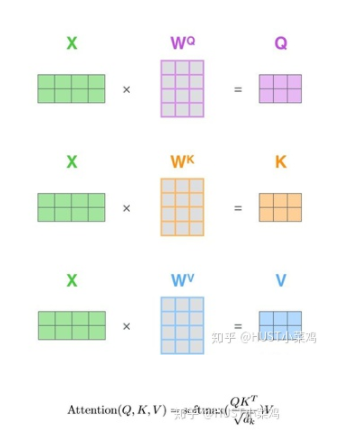
在self-attention中,每個(gè)單詞有3個(gè)不同的向量,它們分別是Query向量,Key向量和Value向量,長(zhǎng)度均是64。它們是通過3個(gè)不同的權(quán)值矩陣由嵌入向量X乘以三個(gè)不同的權(quán)值矩陣得到,其中三個(gè)矩陣的尺寸也是相同的。均是512×64。
Self_attention的計(jì)算過程如下
- 將輸入單詞轉(zhuǎn)化成嵌入向量;
- 根據(jù)嵌入向量得到q,k,v三個(gè)向量;
- 為每個(gè)向量計(jì)算一個(gè)score:score=q×v;
- 為了梯度的穩(wěn)定,Transformer使用了score歸一化,即除以sqrt(dk);
- 對(duì)score施以softmax激活函數(shù);
- softmax點(diǎn)乘Value值v,得到加權(quán)的每個(gè)輸入向量的評(píng)分v;
- 相加之后得到最終的輸出結(jié)果z。
矩陣形式的計(jì)算過程:

具體的實(shí)施可以參照detr的models/transformer
# Copyright (c) Facebook, Inc. and its affiliates. All Rights Reserved"""DETR Transformer class.Copy-paste from torch.nn.Transformer with modifications:* positional encodings are passed in MHattention* extra LN at the end of encoder is removed* decoder returns a stack of activations from all decoding layers"""import copyfrom typing import Optional, Listimport torchimport torch.nn.functional as Ffrom torch import nn, Tensorclass Transformer(nn.Module):def __init__(self, d_model=512, nhead=8, num_encoder_layers=6,num_decoder_layers=6, dim_feedforward=2048, dropout=0.1,activation="relu", normalize_before=False,return_intermediate_dec=False):super().__init__()encoder_layer = TransformerEncoderLayer(d_model, nhead, dim_feedforward,dropout, activation, normalize_before)encoder_norm = nn.LayerNorm(d_model) if normalize_before else Noneself.encoder = TransformerEncoder(encoder_layer, num_encoder_layers, encoder_norm)decoder_layer = TransformerDecoderLayer(d_model, nhead, dim_feedforward,dropout, activation, normalize_before)decoder_norm = nn.LayerNorm(d_model)self.decoder = TransformerDecoder(decoder_layer, num_decoder_layers, decoder_norm,return_intermediate=return_intermediate_dec)self._reset_parameters()self.d_model = d_modelself.nhead = nheaddef _reset_parameters(self):for p in self.parameters():if p.dim() > 1:nn.init.xavier_uniform_(p)def forward(self, src, mask, query_embed, pos_embed):# flatten NxCxHxW to HWxNxCbs, c, h, w = src.shapesrc = src.flatten(2).permute(2, 0, 1)pos_embed = pos_embed.flatten(2).permute(2, 0, 1)query_embed = query_embed.unsqueeze(1).repeat(1, bs, 1)mask = mask.flatten(1)tgt = torch.zeros_like(query_embed)memory = self.encoder(src, src_key_padding_mask=mask, pos=pos_embed)hs = self.decoder(tgt, memory, memory_key_padding_mask=mask,pos=pos_embed, query_pos=query_embed)return hs.transpose(1, 2), memory.permute(1, 2, 0).view(bs, c, h, w)class TransformerEncoder(nn.Module):def __init__(self, encoder_layer, num_layers, norm=None):super().__init__()self.layers = _get_clones(encoder_layer, num_layers)self.num_layers = num_layersself.norm = normdef forward(self, src,mask: Optional[Tensor] = None,src_key_padding_mask: Optional[Tensor] = None,pos: Optional[Tensor] = None):output = srcfor layer in self.layers:output = layer(output, src_mask=mask,src_key_padding_mask=src_key_padding_mask, pos=pos)if self.norm is not None:output = self.norm(output)return outputclass TransformerDecoder(nn.Module):def __init__(self, decoder_layer, num_layers, norm=None, return_intermediate=False):super().__init__()self.layers = _get_clones(decoder_layer, num_layers)self.num_layers = num_layersself.norm = normself.return_intermediate = return_intermediatedef forward(self, tgt, memory,tgt_mask: Optional[Tensor] = None,memory_mask: Optional[Tensor] = None,tgt_key_padding_mask: Optional[Tensor] = None,memory_key_padding_mask: Optional[Tensor] = None,pos: Optional[Tensor] = None,query_pos: Optional[Tensor] = None):output = tgtintermediate = []for layer in self.layers:output = layer(output, memory, tgt_mask=tgt_mask,memory_mask=memory_mask,tgt_key_padding_mask=tgt_key_padding_mask,memory_key_padding_mask=memory_key_padding_mask,pos=pos, query_pos=query_pos)if self.return_intermediate:intermediate.append(self.norm(output))if self.norm is not None:output = self.norm(output)if self.return_intermediate:intermediate.pop()intermediate.append(output)if self.return_intermediate:return torch.stack(intermediate)return outputclass TransformerEncoderLayer(nn.Module):def __init__(self, d_model, nhead, dim_feedforward=2048, dropout=0.1,activation="relu", normalize_before=False):super().__init__()self.self_attn = nn.MultiheadAttention(d_model, nhead, dropout=dropout)# Implementation of Feedforward modelself.linear1 = nn.Linear(d_model, dim_feedforward)self.dropout = nn.Dropout(dropout)self.linear2 = nn.Linear(dim_feedforward, d_model)self.norm1 = nn.LayerNorm(d_model)self.norm2 = nn.LayerNorm(d_model)self.dropout1 = nn.Dropout(dropout)self.dropout2 = nn.Dropout(dropout)self.activation = _get_activation_fn(activation)self.normalize_before = normalize_beforedef with_pos_embed(self, tensor, pos: Optional[Tensor]):return tensor if pos is None else tensor + posdef forward_post(self,src,src_mask: Optional[Tensor] = None,src_key_padding_mask: Optional[Tensor] = None,pos: Optional[Tensor] = None):q = k = self.with_pos_embed(src, pos)src2 = self.self_attn(q, k, value=src, attn_mask=src_mask,key_padding_mask=src_key_padding_mask)[0]src = src + self.dropout1(src2)src = self.norm1(src)src2 = self.linear2(self.dropout(self.activation(self.linear1(src))))src = src + self.dropout2(src2)src = self.norm2(src)return srcdef forward_pre(self, src,src_mask: Optional[Tensor] = None,src_key_padding_mask: Optional[Tensor] = None,pos: Optional[Tensor] = None):src2 = self.norm1(src)q = k = self.with_pos_embed(src2, pos)src2 = self.self_attn(q, k, value=src2, attn_mask=src_mask,key_padding_mask=src_key_padding_mask)[0]src = src + self.dropout1(src2)src2 = self.norm2(src)src2 = self.linear2(self.dropout(self.activation(self.linear1(src2))))src = src + self.dropout2(src2)return srcdef forward(self, src,src_mask: Optional[Tensor] = None,src_key_padding_mask: Optional[Tensor] = None,pos: Optional[Tensor] = None):if self.normalize_before:return self.forward_pre(src, src_mask, src_key_padding_mask, pos)return self.forward_post(src, src_mask, src_key_padding_mask, pos)class TransformerDecoderLayer(nn.Module):def __init__(self, d_model, nhead, dim_feedforward=2048, dropout=0.1,activation="relu", normalize_before=False):super().__init__()self.self_attn = nn.MultiheadAttention(d_model, nhead, dropout=dropout)self.multihead_attn = nn.MultiheadAttention(d_model, nhead, dropout=dropout)# Implementation of Feedforward modelself.linear1 = nn.Linear(d_model, dim_feedforward)self.dropout = nn.Dropout(dropout)self.linear2 = nn.Linear(dim_feedforward, d_model)self.norm1 = nn.LayerNorm(d_model)self.norm2 = nn.LayerNorm(d_model)self.norm3 = nn.LayerNorm(d_model)self.dropout1 = nn.Dropout(dropout)self.dropout2 = nn.Dropout(dropout)self.dropout3 = nn.Dropout(dropout)self.activation = _get_activation_fn(activation)self.normalize_before = normalize_beforedef with_pos_embed(self, tensor, pos: Optional[Tensor]):return tensor if pos is None else tensor + posdef forward_post(self, tgt, memory,tgt_mask: Optional[Tensor] = None,memory_mask: Optional[Tensor] = None,tgt_key_padding_mask: Optional[Tensor] = None,memory_key_padding_mask: Optional[Tensor] = None,pos: Optional[Tensor] = None,query_pos: Optional[Tensor] = None):q = k = self.with_pos_embed(tgt, query_pos)tgt2 = self.self_attn(q, k, value=tgt, attn_mask=tgt_mask,key_padding_mask=tgt_key_padding_mask)[0]tgt = tgt + self.dropout1(tgt2)tgt = self.norm1(tgt)tgt2 = self.multihead_attn(query=self.with_pos_embed(tgt, query_pos),key=self.with_pos_embed(memory, pos),value=memory, attn_mask=memory_mask,key_padding_mask=memory_key_padding_mask)[0]tgt = tgt + self.dropout2(tgt2)tgt = self.norm2(tgt)tgt2 = self.linear2(self.dropout(self.activation(self.linear1(tgt))))tgt = tgt + self.dropout3(tgt2)tgt = self.norm3(tgt)return tgtdef forward_pre(self, tgt, memory,tgt_mask: Optional[Tensor] = None,memory_mask: Optional[Tensor] = None,tgt_key_padding_mask: Optional[Tensor] = None,memory_key_padding_mask: Optional[Tensor] = None,pos: Optional[Tensor] = None,query_pos: Optional[Tensor] = None):tgt2 = self.norm1(tgt)q = k = self.with_pos_embed(tgt2, query_pos)tgt2 = self.self_attn(q, k, value=tgt2, attn_mask=tgt_mask,key_padding_mask=tgt_key_padding_mask)[0]tgt = tgt + self.dropout1(tgt2)tgt2 = self.norm2(tgt)tgt2 = self.multihead_attn(query=self.with_pos_embed(tgt2, query_pos),key=self.with_pos_embed(memory, pos),value=memory, attn_mask=memory_mask,key_padding_mask=memory_key_padding_mask)[0]tgt = tgt + self.dropout2(tgt2)tgt2 = self.norm3(tgt)tgt2 = self.linear2(self.dropout(self.activation(self.linear1(tgt2))))tgt = tgt + self.dropout3(tgt2)return tgtdef forward(self, tgt, memory,tgt_mask: Optional[Tensor] = None,memory_mask: Optional[Tensor] = None,tgt_key_padding_mask: Optional[Tensor] = None,memory_key_padding_mask: Optional[Tensor] = None,pos: Optional[Tensor] = None,query_pos: Optional[Tensor] = None):if self.normalize_before:return self.forward_pre(tgt, memory, tgt_mask, memory_mask,tgt_key_padding_mask, memory_key_padding_mask, pos, query_pos)return self.forward_post(tgt, memory, tgt_mask, memory_mask,tgt_key_padding_mask, memory_key_padding_mask, pos, query_pos)def _get_clones(module, N):return nn.ModuleList([copy.deepcopy(module) for i in range(N)])def build_transformer(args):return Transformer(d_model=args.hidden_dim,dropout=args.dropout,nhead=args.nheads,dim_feedforward=args.dim_feedforward,num_encoder_layers=args.enc_layers,num_decoder_layers=args.dec_layers,normalize_before=args.pre_norm,return_intermediate_dec=True,)def _get_activation_fn(activation):"""Return an activation function given a string"""if activation == "relu":return F.reluif activation == "gelu":return F.geluif activation == "glu":return F.gluraise RuntimeError(F"activation should be relu/gelu, not {activation}.")
三、軟注意力(soft-attention)
軟注意力是一個(gè)[0,1]間的連續(xù)分布問題,更加關(guān)注區(qū)域或者通道,軟注意力是確定性注意力,學(xué)習(xí)完成后可以通過網(wǎng)絡(luò)生成,并且是可微的,可以通過神經(jīng)網(wǎng)絡(luò)計(jì)算出梯度并且可以前向傳播和后向反饋來學(xué)習(xí)得到注意力的權(quán)重。
1、空間域注意力(spatial transformer network)
論文地址:http://papers.nips.cc/paper/5854-spatial-transformer-networks
GitHub地址:https://github.com/fxia22/stn.pytorch
空間區(qū)域注意力可以理解為讓神經(jīng)網(wǎng)絡(luò)在看哪里。通過注意力機(jī)制,將原始圖片中的空間信息變換到另一個(gè)空間中并保留了關(guān)鍵信息,在很多現(xiàn)有的方法中都有使用這種網(wǎng)絡(luò),自己接觸過的一個(gè)就是ALPHA Pose。spatial transformer其實(shí)就是注意力機(jī)制的實(shí)現(xiàn),因?yàn)橛?xùn)練出的spatial transformer能夠找出圖片信息中需要被關(guān)注的區(qū)域,同時(shí)這個(gè)transformer又能夠具有旋轉(zhuǎn)、縮放變換的功能,這樣圖片局部的重要信息能夠通過變換而被框盒提取出來。
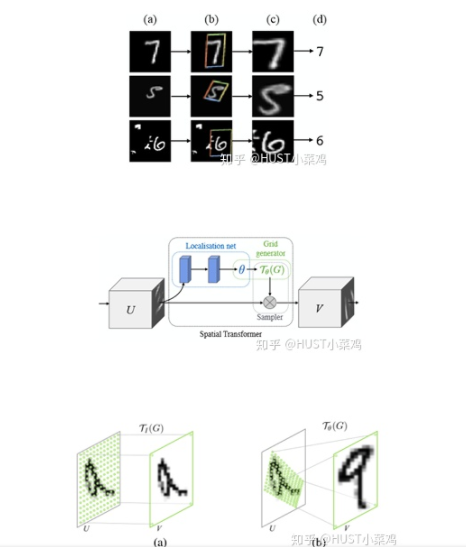

主要在于空間變換矩陣的學(xué)習(xí)
class STN(Module):def __init__(self, layout = 'BHWD'):super(STN, self).__init__()if layout == 'BHWD':self.f = STNFunction()else:self.f = STNFunctionBCHW()def forward(self, input1, input2):return self.f(input1, input2)class STNFunction(Function):def forward(self, input1, input2):self.input1 = input1self.input2 = input2self.device_c = ffi.new("int *")output = torch.zeros(input1.size()[0], input2.size()[1], input2.size()[2], input1.size()[3])#print('decice %d' % torch.cuda.current_device())if input1.is_cuda:self.device = torch.cuda.current_device()else:self.device = -1self.device_c[0] = self.deviceif not input1.is_cuda:my_lib.BilinearSamplerBHWD_updateOutput(input1, input2, output)else:output = output.cuda(self.device)my_lib.BilinearSamplerBHWD_updateOutput_cuda(input1, input2, output, self.device_c)return outputdef backward(self, grad_output):grad_input1 = torch.zeros(self.input1.size())grad_input2 = torch.zeros(self.input2.size())#print('backward decice %d' % self.device)if not grad_output.is_cuda:my_lib.BilinearSamplerBHWD_updateGradInput(self.input1, self.input2, grad_input1, grad_input2, grad_output)else:grad_input1 = grad_input1.cuda(self.device)grad_input2 = grad_input2.cuda(self.device)my_lib.BilinearSamplerBHWD_updateGradInput_cuda(self.input1, self.input2, grad_input1, grad_input2, grad_output, self.device_c)return grad_input1, grad_input2
2、通道注意力(Channel Attention,CA)
通道注意力可以理解為讓神經(jīng)網(wǎng)絡(luò)在看什么,典型的代表是SENet。卷積網(wǎng)絡(luò)的每一層都有好多卷積核,每個(gè)卷積核對(duì)應(yīng)一個(gè)特征通道,相對(duì)于空間注意力機(jī)制,通道注意力在于分配各個(gè)卷積通道之間的資源,分配粒度上比前者大了一個(gè)級(jí)別。
論文:Squeeze-and-Excitation Networks(https://arxiv.org/abs/1709.01507)
GitHub地址:https://github.com/moskomule/senet.pytorch
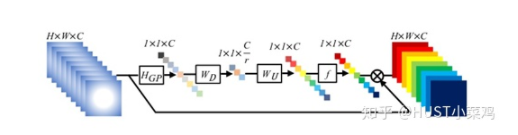
Squeeze操作:將各通道的全局空間特征作為該通道的表示,使用全局平均池化生成各通道的統(tǒng)計(jì)量
Excitation操作:學(xué)習(xí)各通道的依賴程度,并根據(jù)依賴程度對(duì)不同的特征圖進(jìn)行調(diào)整,得到最后的輸出,需要考察各通道的依賴程度
整體的結(jié)構(gòu)如圖所示:
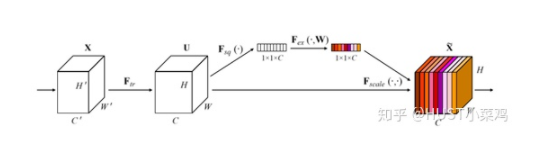
卷積層的輸出并沒有考慮對(duì)各通道的依賴,SEBlock的目的在于然根網(wǎng)絡(luò)選擇性的增強(qiáng)信息量最大的特征,是的后期處理充分利用這些特征并抑制無用的特征。
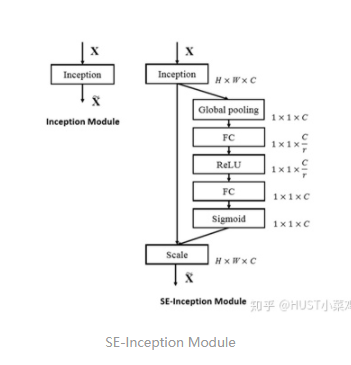
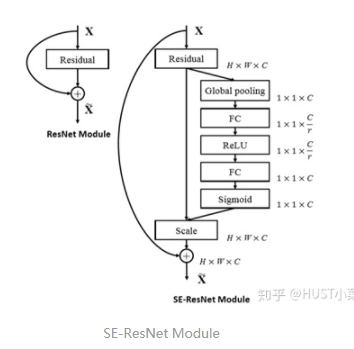
- 將輸入特征進(jìn)行 Global avgpooling,得到1×1×Channel
- 然后bottleneck特征交互一下,先壓縮channel數(shù),再重構(gòu)回channel數(shù)
- 最后接個(gè)sigmoid,生成channel間0~1的attention weights,最后scale乘回原輸入特征
SE-ResNet的SE-Block
class SEBasicBlock(nn.Module):expansion = 1def __init__(self, inplanes, planes, stride=1, downsample=None, groups=1,base_width=64, dilation=1, norm_layer=None,*, reduction=16):super(SEBasicBlock, self).__init__()self.conv1 = conv3x3(inplanes, planes, stride)self.bn1 = nn.BatchNorm2d(planes)self.relu = nn.ReLU(inplace=True)self.conv2 = conv3x3(planes, planes, 1)self.bn2 = nn.BatchNorm2d(planes)self.se = SELayer(planes, reduction)self.downsample = downsampleself.stride = stridedef forward(self, x):residual = xout = self.conv1(x)out = self.bn1(out)out = self.relu(out)out = self.conv2(out)out = self.bn2(out)out = self.se(out)if self.downsample is not None:residual = self.downsample(x)out += residualout = self.relu(out)return outclass SELayer(nn.Module):def __init__(self, channel, reduction=16):super(SELayer, self).__init__()self.avg_pool = nn.AdaptiveAvgPool2d(1)self.fc = nn.Sequential(nn.Linear(channel, channel // reduction, bias=False),nn.ReLU(inplace=True),nn.Linear(channel // reduction, channel, bias=False),nn.Sigmoid())def forward(self, x):b, c, _, _ = x.size()y = self.avg_pool(x).view(b, c)y = self.fc(y).view(b, c, 1, 1)return x * y.expand_as(x)
ResNet的Basic Block
class BasicBlock(nn.Module):def __init__(self, inplanes, planes, stride=1):super(BasicBlock, self).__init__()self.conv1 = conv3x3(inplanes, planes, stride)self.bn1 = nn.BatchNorm2d(planes)self.relu = nn.ReLU(inplace=True)self.conv2 = conv3x3(planes, planes)self.bn2 = nn.BatchNorm2d(planes)if inplanes != planes:self.downsample = nn.Sequential(nn.Conv2d(inplanes, planes, kernel_size=1, stride=stride, bias=False),nn.BatchNorm2d(planes))else:self.downsample = lambda x: xself.stride = stridedef forward(self, x):residual = self.downsample(x)out = self.conv1(x)out = self.bn1(out)out = self.relu(out)out = self.conv2(out)out = self.bn2(out)out += residualout = self.relu(out)return out
兩者的差別主要體現(xiàn)在多了一個(gè)SElayer,詳細(xì)可以查看源碼
3、混合域模型(融合空間域和通道域注意力)
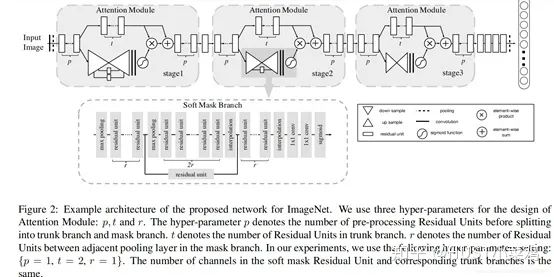
(1)論文:Residual Attention Network for image classification(CVPR 2017 Open Access Repository)
文章中注意力的機(jī)制是軟注意力基本的加掩碼(mask)機(jī)制,但是不同的是,這種注意力機(jī)制的mask借鑒了殘差網(wǎng)絡(luò)的想法,不只根據(jù)當(dāng)前網(wǎng)絡(luò)層的信息加上mask,還把上一層的信息傳遞下來,這樣就防止mask之后的信息量過少引起的網(wǎng)絡(luò)層數(shù)不能堆疊很深的問題。
該文章的注意力機(jī)制的創(chuàng)新點(diǎn)在于提出了殘差注意力學(xué)習(xí)(residual attention learning),不僅只把mask之后的特征張量作為下一層的輸入,同時(shí)也將mask之前的特征張量作為下一層的輸入,這時(shí)候可以得到的特征更為豐富,從而能夠更好的注意關(guān)鍵特征。同時(shí)采用三階注意力模塊來構(gòu)成整個(gè)的注意力。
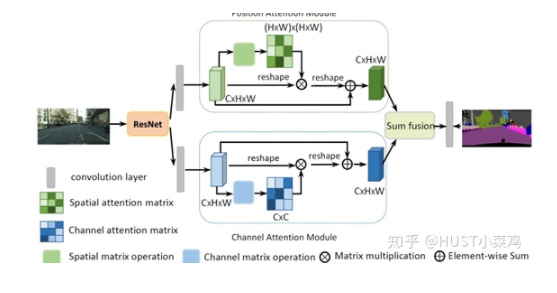
(2)Dual Attention Network for Scene Segmentation(CVPR 2019 Open Access Repository)
4、Non-Local
論文:non-local neural networks(CVPR 2018 Open Access Repository)
GitHub地址:https://github.com/AlexHex7/Non-local_pytorch
Local這個(gè)詞主要是針對(duì)感受野(receptive field)來說的。以單一的卷積操作為例,它的感受野大小就是卷積核大小,而我們一般都選用3*3,5*5之類的卷積核,它們只考慮局部區(qū)域,因此都是local的運(yùn)算。同理,池化(Pooling)也是。相反的,non-local指的就是感受野可以很大,而不是一個(gè)局部領(lǐng)域。全連接就是non-local的,而且是global的。但是全連接帶來了大量的參數(shù),給優(yōu)化帶來困難。卷積層的堆疊可以增大感受野,但是如果看特定層的卷積核在原圖上的感受野,它畢竟是有限的。這是local運(yùn)算不能避免的。然而有些任務(wù),它們可能需要原圖上更多的信息,比如attention。如果在某些層能夠引入全局的信息,就能很好地解決local操作無法看清全局的情況,為后面的層帶去更豐富的信息。
文章定義的對(duì)于神經(jīng)網(wǎng)絡(luò)通用的Non-Local計(jì)算如下所示:
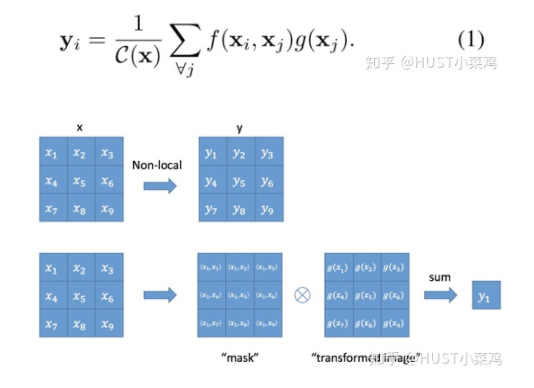
如果按照上面的公式,用for循環(huán)實(shí)現(xiàn)肯定是很慢的。此外,如果在尺寸很大的輸入上應(yīng)用non-local layer,也是計(jì)算量很大的。后者的解決方案是,只在高階語義層中引入non-local layer。還可以通過對(duì)embedding(θ,?,g)的結(jié)果加pooling層來進(jìn)一步地減少計(jì)算量。
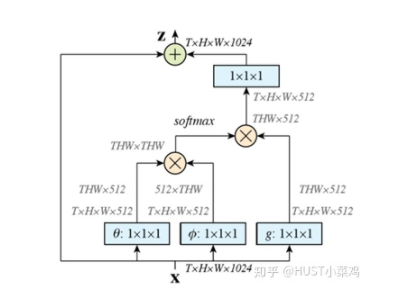
- 首先對(duì)輸入的 feature map X 進(jìn)行線性映射(通過1x1卷積,來壓縮通道數(shù)),然后得到?θ,?,g?特征
- 通過reshape操作,強(qiáng)行合并上述的三個(gè)特征除通道數(shù)外的維度,然后對(duì) 進(jìn)行矩陣點(diǎn)乘操作,得到類似協(xié)方差矩陣的東西(這個(gè)過程很重要,計(jì)算出特征中的自相關(guān)性,即得到每幀中每個(gè)像素對(duì)其他所有幀所有像素的關(guān)系)
- 然后對(duì)自相關(guān)特征 以列or以行(具體看矩陣 g 的形式而定) 進(jìn)行 Softmax 操作,得到0~1的weights,這里就是我們需要的 Self-attention 系數(shù)
- 最后將 attention系數(shù),對(duì)應(yīng)乘回特征矩陣g中,然后再上擴(kuò)channel 數(shù),與原輸入feature map X殘差
5、位置注意力(position-wise attention)
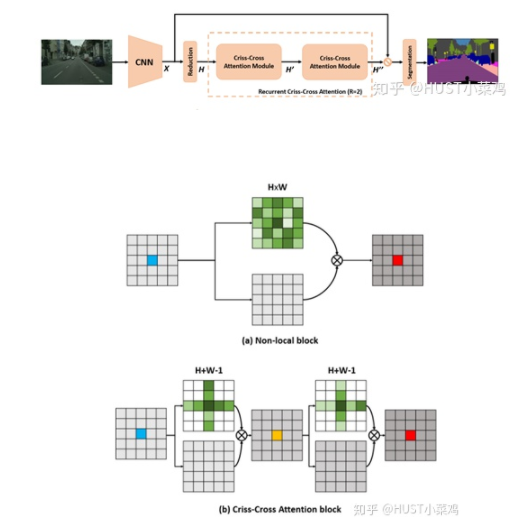
論文:CCNet: Criss-Cross Attention for Semantic Segmentation(ICCV 2019 Open Access Repository)
Github地址:https://github.com/speedinghzl/CCNet
本篇文章的亮點(diǎn)在于用了巧妙的方法減少了參數(shù)量。在上面的DANet中,attention map計(jì)算的是所有像素與所有像素之間的相似性,空間復(fù)雜度為(HxW)x(HxW),而本文采用了criss-cross思想,只計(jì)算每個(gè)像素與其同行同列即十字上的像素的相似性,通過進(jìn)行循環(huán)(兩次相同操作),間接計(jì)算到每個(gè)像素與每個(gè)像素的相似性,將空間復(fù)雜度降為(HxW)x(H+W-1)
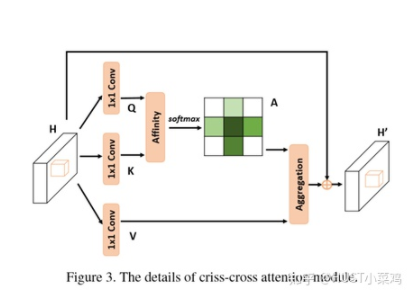
def _check_contiguous(*args):if not all([mod is None or mod.is_contiguous() for mod in args]):raise ValueError("Non-contiguous input")class CA_Weight(autograd.Function):@staticmethoddef forward(ctx, t, f):# Save contextn, c, h, w = t.size()size = (n, h+w-1, h, w)weight = torch.zeros(size, dtype=t.dtype, layout=t.layout, device=t.device)_ext.ca_forward_cuda(t, f, weight)# Outputctx.save_for_backward(t, f)return weight@staticmethod@once_differentiabledef backward(ctx, dw):t, f = ctx.saved_tensorsdt = torch.zeros_like(t)df = torch.zeros_like(f)_ext.ca_backward_cuda(dw.contiguous(), t, f, dt, df)_check_contiguous(dt, df)return dt, dfclass CA_Map(autograd.Function):@staticmethoddef forward(ctx, weight, g):# Save contextout = torch.zeros_like(g)_ext.ca_map_forward_cuda(weight, g, out)# Outputctx.save_for_backward(weight, g)return out@staticmethod@once_differentiabledef backward(ctx, dout):weight, g = ctx.saved_tensorsdw = torch.zeros_like(weight)dg = torch.zeros_like(g)_ext.ca_map_backward_cuda(dout.contiguous(), weight, g, dw, dg)_check_contiguous(dw, dg)return dw, dgca_weight = CA_Weight.applyca_map = CA_Map.applyclass CrissCrossAttention(nn.Module):""" Criss-Cross Attention Module"""def __init__(self,in_dim):super(CrissCrossAttention,self).__init__()self.chanel_in = in_dimself.query_conv = nn.Conv2d(in_channels = in_dim , out_channels = in_dim//8 , kernel_size= 1)self.key_conv = nn.Conv2d(in_channels = in_dim , out_channels = in_dim//8 , kernel_size= 1)self.value_conv = nn.Conv2d(in_channels = in_dim , out_channels = in_dim , kernel_size= 1)self.gamma = nn.Parameter(torch.zeros(1))def forward(self,x):proj_query = self.query_conv(x)proj_key = self.key_conv(x)proj_value = self.value_conv(x)energy = ca_weight(proj_query, proj_key)attention = F.softmax(energy, 1)out = ca_map(attention, proj_value)out = self.gamma*out + xreturn out__all__ = ["CrissCrossAttention", "ca_weight", "ca_map"]
四、強(qiáng)注意力(hard attention)
0/1問題,哪些被attention,哪些不被attention。更加關(guān)注點(diǎn),圖像中的每個(gè)點(diǎn)都可能延伸出注意力,同時(shí)強(qiáng)注意力是一個(gè)隨機(jī)預(yù)測(cè)的過程,更加強(qiáng)調(diào)動(dòng)態(tài)變化,并且是不可微,所以訓(xùn)練過程往往通過增強(qiáng)學(xué)習(xí)。參考資料
https://blog.csdn.net/xys430381_1/article/details/89323444Gapeng:Non-local neural networksNX-8MAA09148HY:雙注意力網(wǎng)絡(luò),是豐富了還是牽強(qiáng)了attention?下載1:OpenCV-Contrib擴(kuò)展模塊中文版教程
在「小白學(xué)視覺」公眾號(hào)后臺(tái)回復(fù):擴(kuò)展模塊中文教程,即可下載全網(wǎng)第一份OpenCV擴(kuò)展模塊教程中文版,涵蓋擴(kuò)展模塊安裝、SFM算法、立體視覺、目標(biāo)跟蹤、生物視覺、超分辨率處理等二十多章內(nèi)容。
下載2:Python視覺實(shí)戰(zhàn)項(xiàng)目52講在「小白學(xué)視覺」公眾號(hào)后臺(tái)回復(fù):Python視覺實(shí)戰(zhàn)項(xiàng)目,即可下載包括圖像分割、口罩檢測(cè)、車道線檢測(cè)、車輛計(jì)數(shù)、添加眼線、車牌識(shí)別、字符識(shí)別、情緒檢測(cè)、文本內(nèi)容提取、面部識(shí)別等31個(gè)視覺實(shí)戰(zhàn)項(xiàng)目,助力快速學(xué)校計(jì)算機(jī)視覺。
下載3:OpenCV實(shí)戰(zhàn)項(xiàng)目20講在「小白學(xué)視覺」公眾號(hào)后臺(tái)回復(fù):OpenCV實(shí)戰(zhàn)項(xiàng)目20講,即可下載含有20個(gè)基于OpenCV實(shí)現(xiàn)20個(gè)實(shí)戰(zhàn)項(xiàng)目,實(shí)現(xiàn)OpenCV學(xué)習(xí)進(jìn)階。
交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三?+?上海交大?+?視覺SLAM“。請(qǐng)按照格式備注,否則不予通過。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~