
基于SLAM的機(jī)器人的自主定位導(dǎo)航解析
來源:https://blog.csdn.net/weixin_37251044/article/details/78515909
作者:Jack_Kuo@CSDN
1.傳統(tǒng)方案:SLAM+路徑規(guī)劃+運動控制;
2.深度學(xué)習(xí):這一兩年,深度學(xué)習(xí)成為人工智能的代名詞。在這個行業(yè),前幾年還是以比較傳統(tǒng)的概率學(xué),或者控制論的方式進(jìn)行機(jī)器人自主定位導(dǎo)航。但這里展現(xiàn)的是完全通過深度學(xué)習(xí),直接通過攝像頭數(shù)據(jù)作為信號輸入,再通過神經(jīng)網(wǎng)絡(luò)直接產(chǎn)生出機(jī)器人的控制信號。其中像 SLAM 的過程、路徑規(guī)劃的過程,完全通過學(xué)習(xí)的方式就可以進(jìn)行實現(xiàn)。
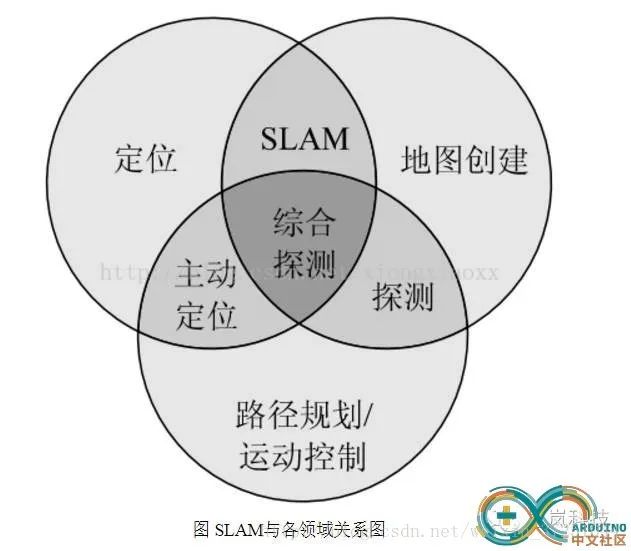
一、SLAM
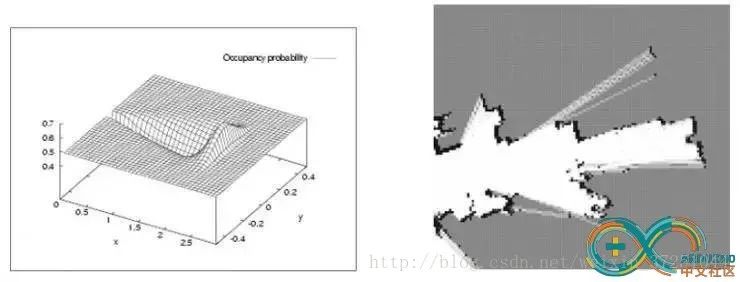
1.選擇地圖
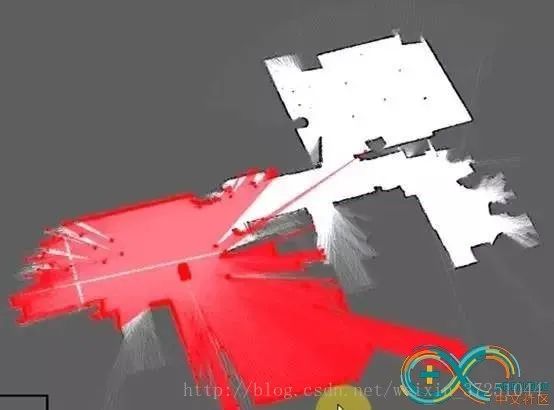
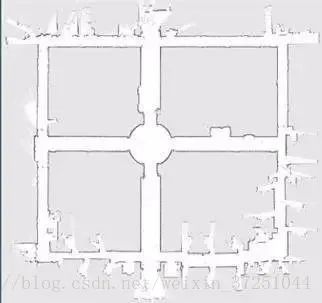
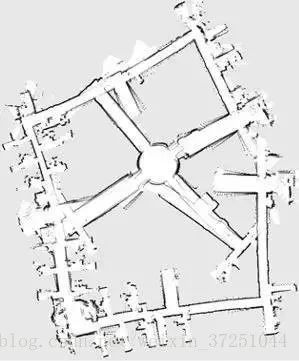
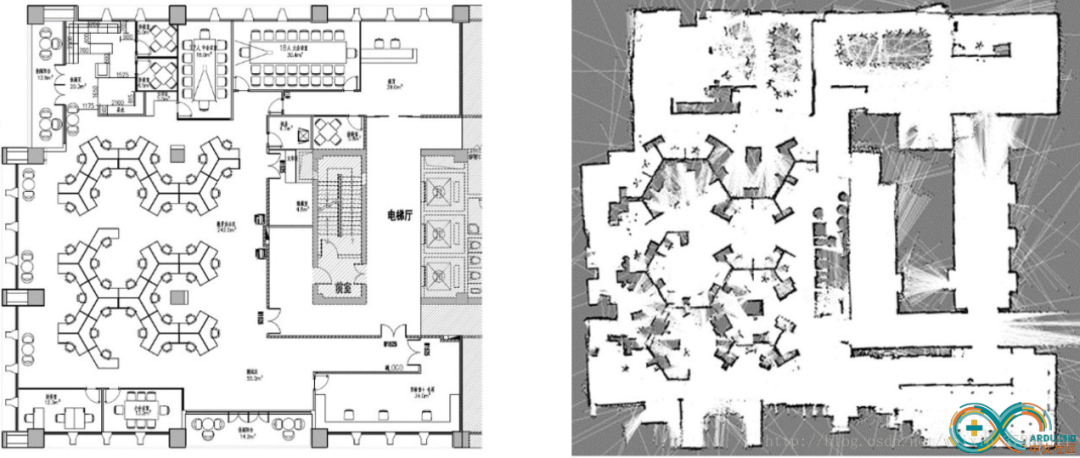
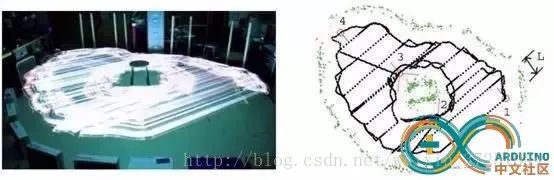
(1)柵格地圖
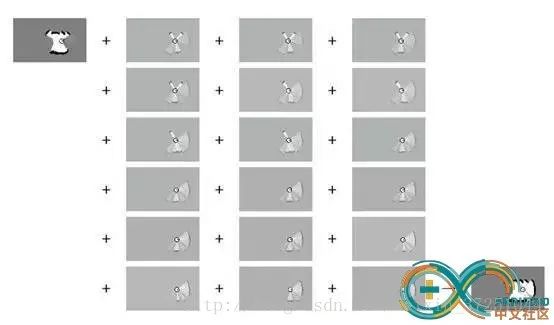
(2)特征點地圖
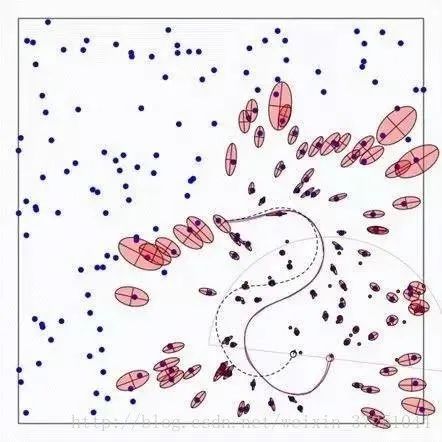
相比柵格地圖,這種地圖看起來就不那么直觀了。它一般通過如GPS、UWB以及攝像頭配合稀疏方式的vSLAM算法產(chǎn)生,優(yōu)點是相對數(shù)據(jù)存儲量和運算量比較小,多見于最早的SLAM算法中。
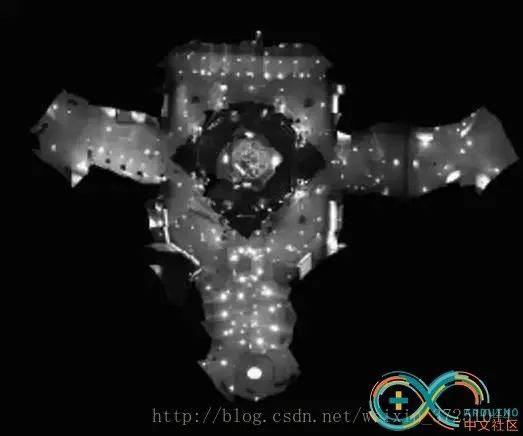
(3)直接表征法
(4)拓?fù)涞貓D
(5)小結(jié)

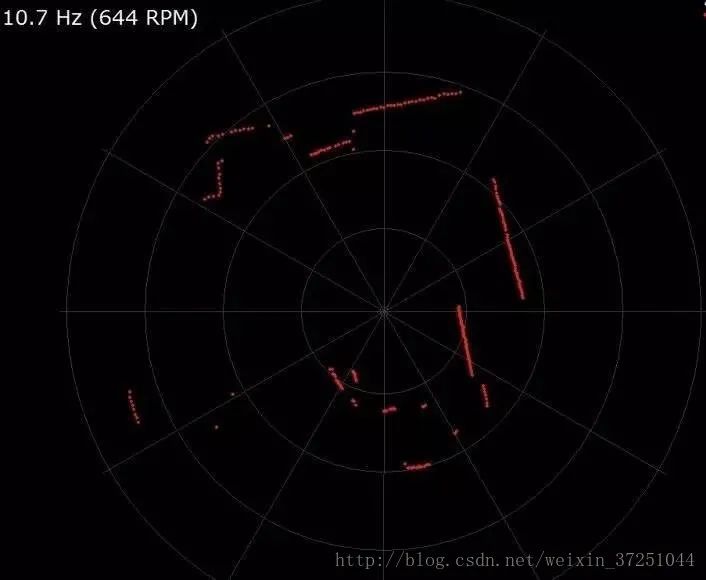
2.定位及傳感器選擇
3.傳感器數(shù)據(jù)預(yù)處理
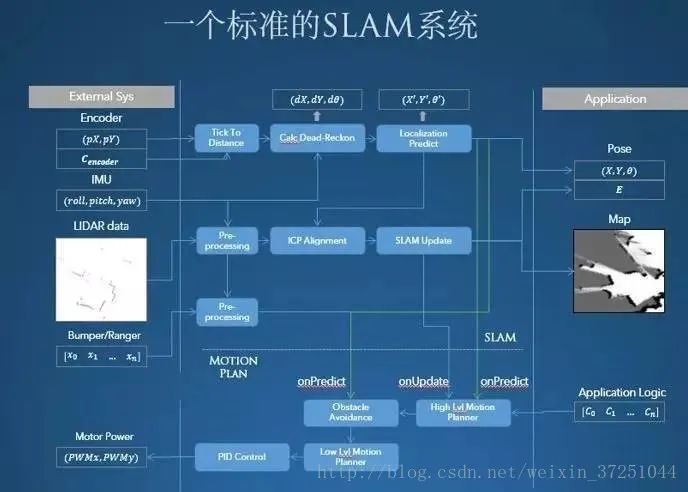
4.匹配

5.地圖融合

6.Loop Closure(回環(huán))問題
7.算法優(yōu)化及商用
擴(kuò)展: 這也是我們思嵐科技SLAMTEC主要的努力方向,一方面,我們這7年多很好的解決了各類實際SLAM算法難點,另一方面,我們把SLAM這個復(fù)雜的系統(tǒng)做了很大的優(yōu)化,可以放到一個硬幣那么大的模塊內(nèi)部,降低尺寸功耗。此外,它還集成了IMU等配套傳感器,力求做到對于SLAM的使用便捷性。
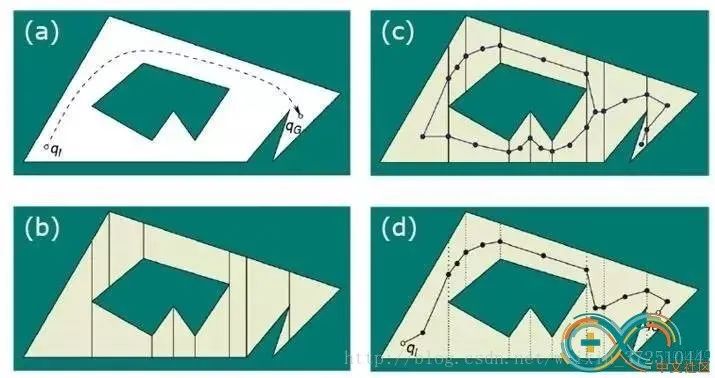
二、路徑規(guī)劃
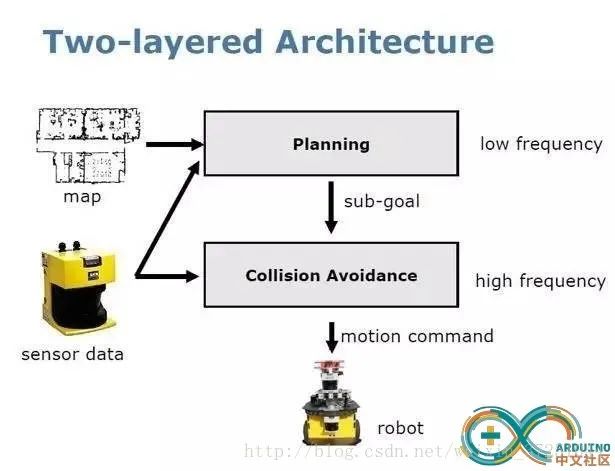
1.全局規(guī)劃
2.局部規(guī)劃
3.已知地圖(A*)與未知地圖(D*)算法
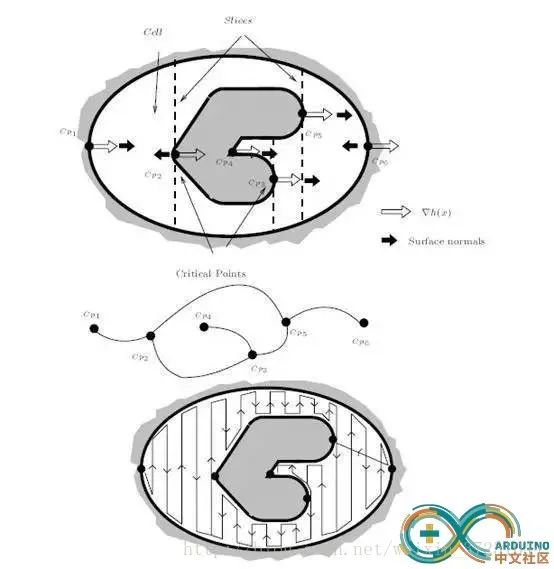
4.空間覆蓋(space coverage)
擴(kuò)展: 針對掃地機(jī)器人,我們將其特有的路徑規(guī)劃功能預(yù)先內(nèi)置在SLAMWARE中,方便廠家進(jìn)行整合,不需要進(jìn)行二次開發(fā)。
End
聲明:部分內(nèi)容來源于網(wǎng)絡(luò),僅供讀者學(xué)術(shù)交流之目的。文章版權(quán)歸原作者所有。如有不妥,請聯(lián)系刪除。
評論
圖片
表情