
基于圖像拼接的無人機自主導(dǎo)航實時SLAM
點擊下方卡片,關(guān)注“新機器視覺”公眾號
重磅干貨,第一時間送達
大多數(shù)無人機利用全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)技術(shù)和慣性傳感器(INS)來估計自己的地理空間定位。無人機通過GNSS接收器進行增強,這些接收器受益于從衛(wèi)星發(fā)射的接收時間無線電信號來計算位置(經(jīng)度,緯度和高度)。當GNS信號下降時,僅基于INS的位置估計就會漂移。因此,為了準確地自主導(dǎo)航航向,必須確保同時接收至少四顆衛(wèi)星的無線電信號。當無人機任務(wù)包括GNSS信號變得不可靠的中間位置時,例如城市地區(qū),室內(nèi)環(huán)境,森林覆蓋的景觀,被山脈包圍的山谷等,或者當無線電信號通過欺騙和游戲操作得到緩解時,這一點無法得到保證,特別是對于在民用頻率上運行的GNSS接收器。
隨著計算機視覺的快速發(fā)展,采用相機的SLAM方法被積極引入,并被稱為視覺SLAM。圖像拼接基本上是通過合并同一場景的兩個或多個圖像來形成具有高分辨率的單個全景圖像,被廣泛用于從數(shù)字地圖和衛(wèi)星圖像中受益的特定區(qū)域的完整映射。使用圖像拼接進行SLAM消除了選擇地標和提取其特征的需要。每兩張連續(xù)捕獲的圖像的特征用于確定飛行距離和方位角。僅在拼接圖像和兩個連續(xù)圖像之間執(zhí)行特征匹配,這兩個圖像是在相同條件下使用相同相機拍攝的。這降低了計算復(fù)雜性,減少了所需的內(nèi)存空間,并提供了一種解決方案,可以將無人機定位在未知路徑中并應(yīng)對地標的修改。
無人機應(yīng)該從具有已知坐標的初始位置開始導(dǎo)航。該方法使用圖像拼接來確定兩個連續(xù)捕獲的圖像之間的角度和距離。受益于無人機的高度,該高度由嵌入在自動駕駛儀中的氣壓計傳感器確定,實際距離是使用地面采樣距離(GSD)方法確定的。對于每個新捕獲的圖像,所有這些步驟都會不斷重復(fù)。每當自動駕駛儀檢測到GNSS接收器發(fā)生故障時,就會計算當前位置的坐標,并使用美國國家海洋電子協(xié)會(NMEA)格式將當前位置的坐標饋送到自動駕駛儀,該格式被大多數(shù)可用的GNSS接收器采用。
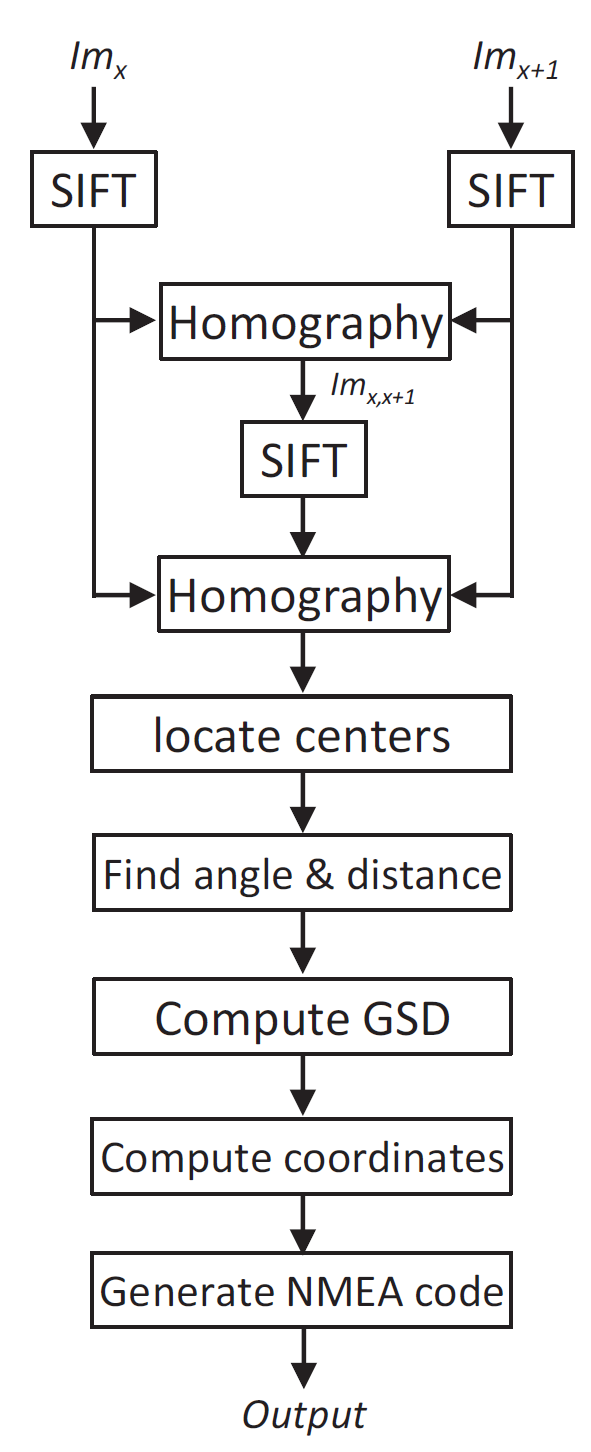
圖像拼接是通過兩種不同的方法實現(xiàn)的:(1)直接方法和(2)基于特征的方法。首先,像素到像素的差異最小化以進行圖像拼接;然而,后者從圖像中提取一組不同的特征,然后相互匹配。在這項工作中,圖像拼接是通過基于特征的方法實現(xiàn)的,因為它更快,更健壯地對抗場景移動,并且能夠自動發(fā)現(xiàn)與直接方法相比隨機圖像集之間的疊加關(guān)系。基于特征的圖像拼接技術(shù)主要包括以下階段:(1)圖像采集,(2)特征檢測,(3)使用隨機樣本共識(RANSAC)估計匹配關(guān)鍵點,(4)全局對齊和(5)圖像混合。圖1描述了所提出方法的總體框架。
①首先,使用SIFT從兩個連續(xù)圖像和中提取特征。
② 然后,使用FLANN特征匹配器,獲得圖像之間匹配區(qū)域的同源性。FLANN代表近似最近鄰的快速庫,這是一種自動算法配置,允許在近似最近鄰匹配中實現(xiàn)高性能。
③最后,根據(jù)像素數(shù)計算兩個中心之間的方位角和空間距離。
圖1 所提出方法的框圖
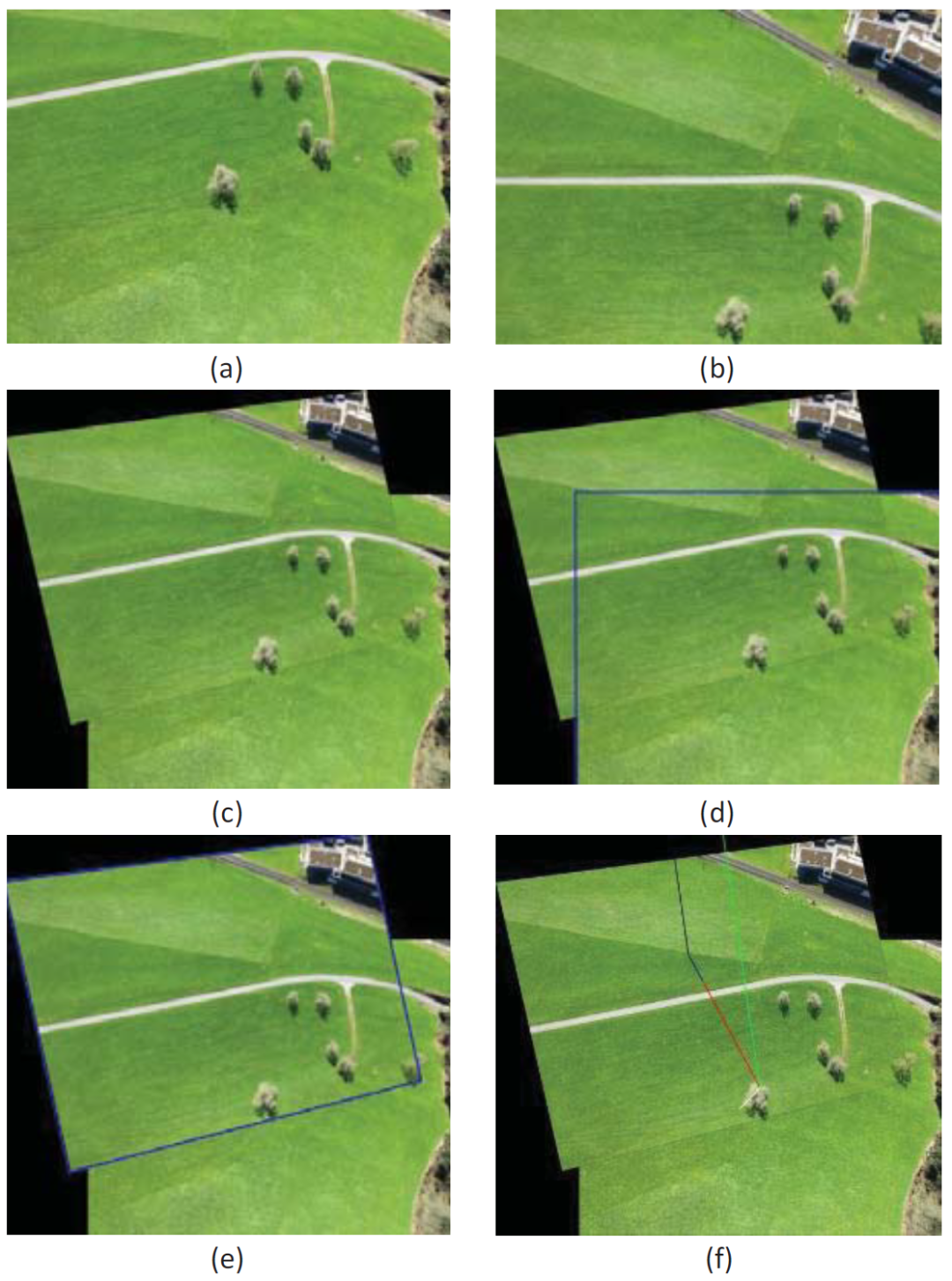
為了驗證所提出的方法,已經(jīng)進行了幾種利用數(shù)據(jù)集的實現(xiàn),這些數(shù)據(jù)集由senseFly提供,并由攜帶senseFly S.O.D.A.攝像頭的eBee Plus無人機收集。與視頻一起附上,提供了每個捕獲幀的元數(shù)據(jù),其中包括位置(緯度,經(jīng)度和高度)。由于尺寸限制,圖2中顯示了使用所建議方法應(yīng)用SLAM的一個示例。、 和分別如圖2(a)、圖2(b)和圖2(c)所示。圖2(d)和圖2(e)分別表示和在中的同質(zhì)性。在圖2(f)中,方位角顯示在代表原始航向的綠線和代表當前航向的紅線之間。請注意,確定坐標所需的總執(zhí)行時間小于飛行持續(xù)時間。
圖2 所建議方法的樣本應(yīng)用
為了檢查所提出方法的相關(guān)性,將元數(shù)據(jù)中的位置與獲得的結(jié)果進行比較。如圖3 所示,圖示示例的誤差為5米,方位角誤差最多為4.6度,其中紅線表示基于所提出方法的距離和角度,黃線表示基于幀元數(shù)據(jù)的距離和角度。請注意,元數(shù)據(jù)中提供的坐標由商業(yè)GPS提供,其等效用戶誤差為7米。
圖3 方位角比較結(jié)果
此方法基于圖像拼接,僅依賴于兩個連續(xù)捕獲的圖像的特征。它允許在GNSS信號下降時確定當前位置的坐標。它的特點是能夠確定未知路徑中的位置并應(yīng)對地標的修改。
源自:2020 IEEE International Conference on Artificial Intelligence Circuits and Systems (AICAS)

本文僅做學術(shù)分享,如有侵權(quán),請聯(lián)系刪文。