
YOLOv6:最新目標(biāo)檢測框架開源
關(guān)注濤濤CV,設(shè)置星標(biāo),更新不錯(cuò)過
1. 概述
YOLOv6是一種專用于工業(yè)應(yīng)用的單級目標(biāo)檢測框架,具有硬件友好的高效設(shè)計(jì)和高性能。
YOLOv6-s在COCO val2017數(shù)據(jù)集上實(shí)現(xiàn)了35.0的mAP,在T4上使用TensorRT FP16進(jìn)行bs32推斷,達(dá)到了1242 FPS,在COCO val2017數(shù)據(jù)集上實(shí)現(xiàn)了43.1的mAP,在T4上使用TensorRT FP16進(jìn)行bs32推斷,達(dá)到了520 FPS。在部署方面,YOLOv6 支持 GPU(TensorRT)、CPU(OPENVINO)、ARM(MNN、TNN、NCNN)等不同平臺的部署,極大地簡化工程部署時(shí)的適配工作。
YOLOv6開源至Github,網(wǎng)址:https://github.com/meituan/YOLOv6
精度與速度遠(yuǎn)超 YOLOv5 和 YOLOX 的新框架
目標(biāo)檢測作為計(jì)算機(jī)視覺領(lǐng)域的一項(xiàng)基礎(chǔ)性技術(shù),在工業(yè)界得到了廣泛的應(yīng)用,其中 YOLO 系列算法因其較好的綜合性能,逐漸成為大多數(shù)工業(yè)應(yīng)用時(shí)的首選框架。至今,業(yè)界已衍生出許多 YOLO 檢測框架,其中以 YOLOv5[1]、YOLOX[2] 和 PP-YOLOE[3] 最具代表性,但在實(shí)際使用中,我們發(fā)現(xiàn)上述框架在速度和精度方面仍有很大的提升的空間。基于此,我們通過研究并借鑒了業(yè)界已有的先進(jìn)技術(shù),開發(fā)了一套新的目標(biāo)檢測框架——YOLOv6。該框架支持模型訓(xùn)練、推理及多平臺部署等全鏈條的工業(yè)應(yīng)用需求,并在網(wǎng)絡(luò)結(jié)構(gòu)、訓(xùn)練策略等算法層面進(jìn)行了多項(xiàng)改進(jìn)和優(yōu)化,在 COCO 數(shù)據(jù)集上,YOLOv6 在精度和速度方面均超越其他同體量算法,相關(guān)結(jié)果如下圖 1 所示:

圖1-1 YOLOv6 各尺寸模型與其他模型性能對比

圖1-2 YOLOv6 與其他模型在不同分辨率下性能對比
圖 1-1 展示了不同尺寸網(wǎng)絡(luò)下各檢測算法的性能對比,曲線上的點(diǎn)分別表示該檢測算法在不同尺寸網(wǎng)絡(luò)下(s/tiny/nano)的模型性能,從圖中可以看到,YOLOv6 在精度和速度方面均超越其他 YOLO 系列同體量算法。
圖 1-2 展示了輸入分辨率變化時(shí)各檢測網(wǎng)絡(luò)模型的性能對比,曲線上的點(diǎn)從左往右分別表示圖像分辨率依次增大時(shí)(384/448/512/576/640)該模型的性能,從圖中可以看到,YOLOv6 在不同分辨率下,仍然保持較大的性能優(yōu)勢。
2. YOLOv6關(guān)鍵技術(shù)介紹
YOLOv6 主要在 BackBone、Neck、Head 以及訓(xùn)練策略等方面進(jìn)行了諸多的改進(jìn):
?我們統(tǒng)一設(shè)計(jì)了更高效的 Backbone 和 Neck :受到硬件感知神經(jīng)網(wǎng)絡(luò)設(shè)計(jì)思想的啟發(fā),基于 RepVGG style[4] 設(shè)計(jì)了可重參數(shù)化、更高效的骨干網(wǎng)絡(luò) EfficientRep Backbone 和 Rep-PAN Neck。
?優(yōu)化設(shè)計(jì)了更簡潔有效的 Efficient Decoupled Head,在維持精度的同時(shí),進(jìn)一步降低了一般解耦頭帶來的額外延時(shí)開銷。
?在訓(xùn)練策略上,我們采用Anchor-free 無錨范式,同時(shí)輔以 SimOTA[2] 標(biāo)簽分配策略以及 SIoU[9] 邊界框回歸損失來進(jìn)一步提高檢測精度。
3. 實(shí)驗(yàn)結(jié)果
經(jīng)過以上優(yōu)化策略和改進(jìn),YOLOv6 在多個(gè)不同尺寸下的模型均取得了卓越的表現(xiàn)。下表 1 展示了 YOLOv6-nano 的消融實(shí)驗(yàn)結(jié)果,從實(shí)驗(yàn)結(jié)果可以看出,我們自主設(shè)計(jì)的檢測網(wǎng)絡(luò)在精度和速度上都帶來了很大的增益。

表1 YOLOv6-nano 消融實(shí)驗(yàn)結(jié)果
下表 2 展示了 YOLOv6 與當(dāng)前主流的其他 YOLO 系列算法相比較的實(shí)驗(yàn)結(jié)果。從表格中可以看到:
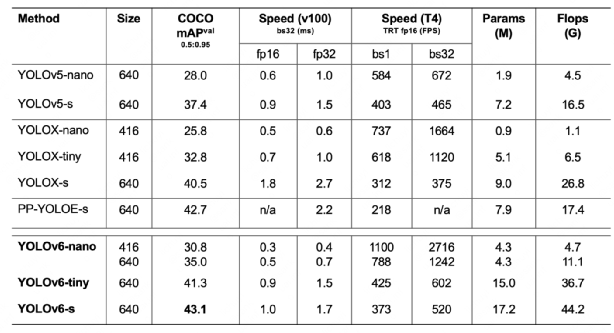
表2 YOLOv6各尺寸模型性能與其他模型的比較
?YOLOv6-nano 在 COCO val 上 取得了 35.0% AP 的精度,同時(shí)在 T4 上使用 TRT FP16 batchsize=32 進(jìn)行推理,可達(dá)到 1242FPS 的性能,相較于 YOLOv5-nano 精度提升 7% AP,速度提升 85%。
?YOLOv6-tiny 在 COCO val 上 取得了 41.3% AP 的精度, 同時(shí)在 T4 上使用 TRT FP16 batchsize=32 進(jìn)行推理,可達(dá)到 602FPS 的性能,相較于 YOLOv5-s 精度提升 3.9% AP,速度提升 29.4%。
?YOLOv6-s 在 COCO val 上 取得了 43.1% AP 的精度, 同時(shí)在 T4 上使用 TRT FP16 batchsize=32 進(jìn)行推理,可達(dá)到 520FPS 的性能,相較于 YOLOX-s 精度提升 2.6% AP,速度提升 38.6%;相較于 PP-YOLOE-s 精度提升 0.4% AP的條件下,在T4上使用 TRT FP16 進(jìn)行單 batch 推理,速度提升 71.3%。
4. 總結(jié)與展望
本文介紹了美團(tuán)視覺智能部在目標(biāo)檢測框架方面的優(yōu)化及實(shí)踐經(jīng)驗(yàn),我們針對 YOLO 系列框架,在訓(xùn)練策略、主干網(wǎng)絡(luò)、多尺度特征融合、檢測頭等方面進(jìn)行了思考和優(yōu)化,設(shè)計(jì)了新的檢測框架-YOLOv6,初衷來自于解決工業(yè)應(yīng)用落地時(shí)所遇到的實(shí)際問題。
在打造 YOLOv6 框架的同時(shí),我們探索和優(yōu)化了一些新的方法,例如基于硬件感知神經(jīng)網(wǎng)絡(luò)設(shè)計(jì)思想自研了 EfficientRep Backbone、Rep-Neck 和 Efficient Decoupled Head,同時(shí)也吸收借鑒了學(xué)術(shù)界和工業(yè)界的一些前沿進(jìn)展和成果,例如 Anchor-free、SimOTA 和 SIoU 回歸損失。在 COCO 數(shù)據(jù)集上的實(shí)驗(yàn)結(jié)果顯示,YOLOv6 在檢測精度和速度方面都屬于佼佼者。
總結(jié):
10年機(jī)器視覺網(wǎng)站,5年人工智能網(wǎng)站
2019經(jīng)歷總結(jié),2018視覺總結(jié)
課程:
《機(jī)器視覺:應(yīng)用講解》,一總體概述,二相機(jī)篇,三鏡頭篇,四光源篇,五光學(xué)系統(tǒng)選型,六視覺開發(fā)軟件,七相機(jī)標(biāo)定技術(shù),八項(xiàng)目案例解析,九視覺公司分析,十產(chǎn)業(yè)發(fā)展情況
筆記:
《智能革命》《人工智能》《AI?未來》《好好賺錢》《韭菜的自我修養(yǎng)》讀書筆記
行業(yè):
服務(wù)機(jī)器人公司,機(jī)器視覺公司,自動(dòng)駕駛公司,ADAS公司總結(jié), 防疫機(jī)器人發(fā)展,騰訊未來交通
SLAM:
Vslam方案+源碼,語義SLAM與深度相機(jī),SLAM和導(dǎo)航避障,視覺SLAM總結(jié)
秦學(xué)英《三維物體的識別與跟蹤》,章國鋒《視覺SLAM》,申抒含《基于圖像的三維建模》,姜翰青《RGB -D SLAM》記錄筆記
機(jī)器視覺:
毫米波雷達(dá),雷達(dá)視覺融合,2021視覺研討會(huì),2020上海研討會(huì),雙目和激光的三維重建,2021視覺市場研究,太陽能行業(yè)應(yīng)用
機(jī)器視覺基本概念筆記,記錄五,記錄四,記錄三,記錄二,記錄一
圖像處理:
圖像處理基本概念筆記,記錄八,記錄七,記錄六 ,記錄五,記錄四 ,記錄三,記錄二 ,記錄二,記錄一
歡迎支持,點(diǎn)擊在看,分享