
利用高精度拼接算法實(shí)現(xiàn)長(zhǎng)柱形物體檢測(cè)
點(diǎn)擊上方“小白學(xué)視覺(jué)”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)

今天跟大家分享的是我們?cè)诮鼛啄甓啻纬晒υ诳蛻衄F(xiàn)場(chǎng)部署的利用高精度拼接算法實(shí)現(xiàn)長(zhǎng)柱形物體檢測(cè)方案。
長(zhǎng)柱形物體是指截面尺寸遠(yuǎn)遠(yuǎn)小于其長(zhǎng)度的一類(lèi)物體,長(zhǎng)柱形物體檢測(cè)即為該類(lèi)物體檢測(cè)的總稱(chēng),例如鋼軌檢測(cè),鑄管檢測(cè),原木檢測(cè)等。此類(lèi)被測(cè)物要求完整還原被測(cè)物的截面面輪廓形狀,并實(shí)時(shí)檢測(cè)處理截面輪廓數(shù)據(jù)。在被測(cè)物成型較高的場(chǎng)合中,要求精度基本在50μm以下,市面上雖然有基于傳感器的拼接工具,但是靈活性差,僅僅做了傳感器兩個(gè)方向的標(biāo)定,因此在實(shí)際應(yīng)用場(chǎng)合中完成0.05mm的檢測(cè)變的難以實(shí)現(xiàn)。
為了實(shí)現(xiàn)長(zhǎng)柱形物體自動(dòng)化檢測(cè),大恒圖像開(kāi)發(fā)了多相機(jī)高精度拼接算法工具,利用多相機(jī)標(biāo)定結(jié)果,實(shí)時(shí)生成完整輪廓形狀并提取關(guān)鍵點(diǎn)與CAD模型尺寸進(jìn)行對(duì)比,如檢測(cè)到不合格,通過(guò)標(biāo)準(zhǔn)協(xié)議傳輸至對(duì)應(yīng)的實(shí)施硬件,做該不合格位置的標(biāo)記點(diǎn)。從而順利完成整個(gè)檢測(cè)、標(biāo)記流程。
該解決方案可根據(jù)被測(cè)物的實(shí)際形狀和檢測(cè)精度配備不同視野、不同精度的各種廠商傳感器(不支持?jǐn)?shù)據(jù)二次開(kāi)發(fā)的廠商除外)。該解決方案已經(jīng)在客戶現(xiàn)場(chǎng)成功部署。其中的圖像采集部分可采用AT線激光傳感器或者使用LMI 2XXX系列輪廓傳感器,保證了數(shù)據(jù)快速穩(wěn)定高精度獲取,圖像處理部分基于HALCON進(jìn)行開(kāi)發(fā),方便輪廓數(shù)據(jù)任意指標(biāo)的拓展性檢測(cè)。
成功案例
客戶 : 某公司
地點(diǎn):華北
行業(yè):鐵路
實(shí)施年份:2019
檢測(cè)指標(biāo):高鐵鐵軌截面尺寸檢測(cè)
在軌道交通運(yùn)行中,無(wú)論是客車(chē),火車(chē)還是為我們熟知的高鐵,鋼軌在其中都是必不可少的重要組成部件,其作用是引導(dǎo)列車(chē)轉(zhuǎn)向架車(chē)輪前進(jìn)和承受車(chē)輪的巨大壓力。其截面形狀采用具有最適用列車(chē)運(yùn)行的工字形斷面。近年來(lái)高鐵的發(fā)展尤為迅速,為保證鋼軌的穩(wěn)定量產(chǎn)和關(guān)鍵質(zhì)量控制,同時(shí)也要保證后續(xù)列車(chē)安全穩(wěn)定運(yùn)行,鋼軌截面尺寸的檢測(cè)顯得更為重要。
本方案通過(guò)多相機(jī)組網(wǎng)來(lái)覆蓋和采集鋼軌輪廓數(shù)據(jù),通過(guò)HALCON來(lái)實(shí)時(shí)計(jì)算輪廓形狀并與標(biāo)準(zhǔn)情況進(jìn)行對(duì)比。方案應(yīng)用結(jié)果表明,該方案可在0.03S內(nèi)完成一次鋼軌輪廓檢測(cè),其誤差在0.05mm內(nèi)。以下為方案的設(shè)計(jì)圖以及軌廓的計(jì)算結(jié)果顯示:
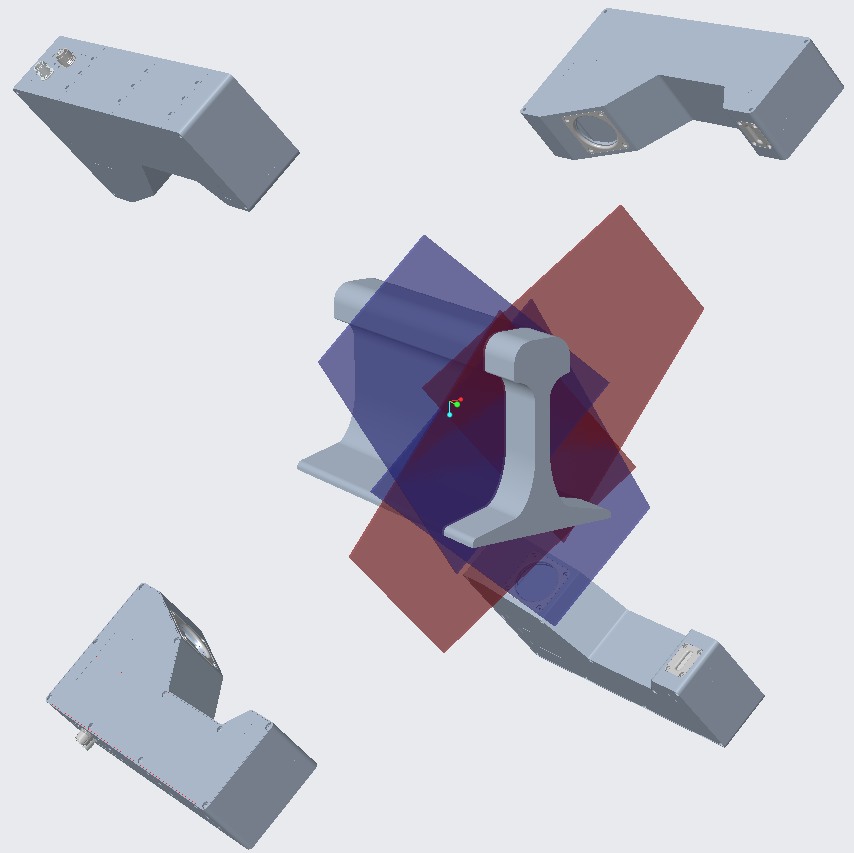
方案設(shè)計(jì)圖
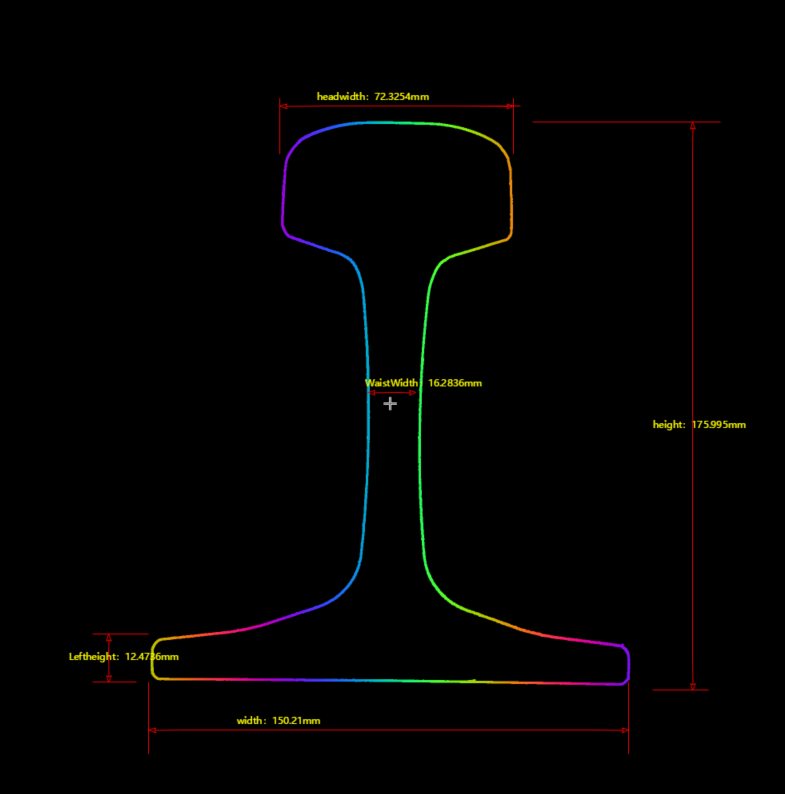
軌廓點(diǎn)云測(cè)量結(jié)果
好消息!
小白學(xué)視覺(jué)知識(shí)星球
開(kāi)始面向外開(kāi)放啦??????
下載1:OpenCV-Contrib擴(kuò)展模塊中文版教程 在「小白學(xué)視覺(jué)」公眾號(hào)后臺(tái)回復(fù):擴(kuò)展模塊中文教程,即可下載全網(wǎng)第一份OpenCV擴(kuò)展模塊教程中文版,涵蓋擴(kuò)展模塊安裝、SFM算法、立體視覺(jué)、目標(biāo)跟蹤、生物視覺(jué)、超分辨率處理等二十多章內(nèi)容。 下載2:Python視覺(jué)實(shí)戰(zhàn)項(xiàng)目52講 在「小白學(xué)視覺(jué)」公眾號(hào)后臺(tái)回復(fù):Python視覺(jué)實(shí)戰(zhàn)項(xiàng)目,即可下載包括圖像分割、口罩檢測(cè)、車(chē)道線檢測(cè)、車(chē)輛計(jì)數(shù)、添加眼線、車(chē)牌識(shí)別、字符識(shí)別、情緒檢測(cè)、文本內(nèi)容提取、面部識(shí)別等31個(gè)視覺(jué)實(shí)戰(zhàn)項(xiàng)目,助力快速學(xué)校計(jì)算機(jī)視覺(jué)。 下載3:OpenCV實(shí)戰(zhàn)項(xiàng)目20講 在「小白學(xué)視覺(jué)」公眾號(hào)后臺(tái)回復(fù):OpenCV實(shí)戰(zhàn)項(xiàng)目20講,即可下載含有20個(gè)基于OpenCV實(shí)現(xiàn)20個(gè)實(shí)戰(zhàn)項(xiàng)目,實(shí)現(xiàn)OpenCV學(xué)習(xí)進(jìn)階。 交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺(jué)、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱(chēng)+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺(jué)SLAM“。請(qǐng)按照格式備注,否則不予通過(guò)。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~