CV算法工程師面試圖像處理知識(shí)點(diǎn)匯總!
點(diǎn)擊下方“AI算法與圖像處理”,關(guān)注一下
重磅干貨,第一時(shí)間送達(dá)
導(dǎo)讀
本篇主要包含了圖像濾波、邊緣檢測(cè)相關(guān)常考內(nèi)容等相關(guān)面試經(jīng)驗(yàn)。
作者燈會(huì)為21屆中部985研究生,憑借自己整理的面經(jīng),去年在騰訊優(yōu)圖暑期實(shí)習(xí),七月份將入職百度cv算法工程師。在去年灰飛煙滅的算法求職季中,經(jīng)過30+場(chǎng)不同公司以及不同部門的面試中積累出了CV總復(fù)習(xí)系列,此為傳統(tǒng)圖像處理篇。
圖像濾波
圖像濾波:在盡量保留圖像細(xì)節(jié)特征的條件下對(duì)目標(biāo)圖像的噪聲進(jìn)行抑制。
平滑:也稱模糊, 是一項(xiàng)簡(jiǎn)單且使用頻率很高的圖像處理方法。平滑的一種作用就是用來減弱噪聲。
1.列出常見的線性濾波器
低通濾波器 允許低頻通過
高通濾波器 允許高頻通過
帶通濾波器 允許一定范圍的頻率通過
帶阻濾波器 允許一定范圍的頻率通過并阻止其他的頻率通過
全通濾波器 允許所有頻率通過,只改變相位
陷波濾波器 阻止一個(gè)狹窄頻率范圍通過
2.線性濾波與非線性濾波
線性濾波:方框?yàn)V波 均值濾波 高斯濾波 非線性濾波:中值濾波 雙邊濾波
①方框?yàn)V波(boxblur函數(shù)):每一個(gè)輸出像素的是內(nèi)核鄰域像素值的平均值得到
②均值濾波(Blur函數(shù)):均值濾波實(shí)際上就是用均值代替原圖像中的各個(gè)像素值。
把每個(gè)像素都用周圍的8個(gè)像素來做均值操作
原理:在圖像上,對(duì)待處理的像素給定一個(gè)模板,該模板包括了其周圍的鄰近像素。將模板中的全體像素的均值來替代原來的像素值的方法。
方法:對(duì)待處理的當(dāng)前像素,選擇一個(gè)模板,該模板為其近鄰的若干像素組成,
用模板中像素的均值來代替原像素值的方法。
優(yōu)點(diǎn):把每個(gè)像素都用周圍的 8 個(gè)像素做均值操作,平滑圖像速度快、算法簡(jiǎn)單。
缺點(diǎn):1、在降低噪聲的同時(shí),使圖像產(chǎn)生模糊,特別是邊緣和細(xì)節(jié)處,而且模糊尺寸越大,圖像模糊程度越大。2、對(duì)椒鹽噪聲的平滑處理效果不理想。(無法去掉噪聲)
不能很好地保護(hù)圖像細(xì)節(jié),在圖像去噪的同時(shí)也破壞了圖像的細(xì)節(jié)部分,從而使圖像變模糊,不能很好去除噪聲點(diǎn)。
③高斯濾波(Gauss filter)
高斯濾波是一種線性平滑濾波,適用于消除高斯噪聲,廣泛應(yīng)用于圖像處理的減噪過程。
高斯濾波就是對(duì)整幅圖像進(jìn)行加權(quán)平均的過程,每一個(gè)像素點(diǎn)的值,都由其本身和鄰域內(nèi)的其他像素值經(jīng)過加權(quán)平均后得到。
高斯濾波的具體操作是:用一個(gè)模板(或稱卷積、掩模)掃描圖像中的每一個(gè)像素,用模板確定的鄰域內(nèi)像素的加權(quán)平均灰度值去替代模板中心像素點(diǎn)的值用。
高斯平滑濾波器對(duì)于抑制服從正態(tài)分布的噪聲非常有效。
④中值濾波(Median filter)
中值濾波是一種典型的非線性濾波技術(shù),基本思想是用像素點(diǎn)鄰域灰度值的中值來代替該像素點(diǎn)的灰度值,該方法在去除脈沖噪聲、椒鹽噪聲的同時(shí)又能保留圖像邊緣細(xì)節(jié)。
⑤雙邊濾波
雙邊濾波(Bilateral filter)是一種非線性的濾波方法,是結(jié)合圖像的空間鄰近度和像素值相似度的一種折衷處理,同時(shí)考慮空域信息和灰度相似性,達(dá)到保邊去噪的目的。具有簡(jiǎn)單、非迭代、局部的特點(diǎn)。
用在對(duì)邊緣信息重要,需要保留的圖像去噪。缺點(diǎn)是由于雙邊濾波保證了邊緣信息,所以其保存了過多的高頻信息,對(duì)于彩色圖像里的高頻噪聲,雙邊濾波器不能夠干凈地濾去,只能對(duì)于低頻信息進(jìn)行較好地濾波。
⑥維納濾波
維納濾波是一種自適應(yīng)最小均方差濾波器。維納濾波的方法是一種統(tǒng)計(jì)方法,它用的最優(yōu)準(zhǔn)則是基于圖像和噪聲各自相關(guān)的相關(guān)矩陣,它能根據(jù)圖像的局部方差調(diào)整濾波器的輸出,局部方差越大,濾波器的平滑作用就越強(qiáng)。
椒鹽噪聲用什么濾波? 中值濾波
邊緣檢測(cè)
邊緣檢測(cè)的目的就是找到圖像中亮度變化劇烈的像素點(diǎn)構(gòu)成的集合,表現(xiàn)出來往往是輪廓。如果圖像中邊緣能夠精確的測(cè)量和定位,那么,就意味著實(shí)際的物體能夠被定位和測(cè)量,包括物體的面積、物體的直徑、物體的形狀等就能被測(cè)量。
邊緣檢測(cè)算子有哪些:
一階:Roberts Cross算子, Prewitt算子, Sobel算子, Canny算子,羅盤算子
二階:Laplacian算子,Marr-Hildreth,在梯度方向的二階導(dǎo)數(shù)過零點(diǎn)。
1.介紹canny邊緣檢測(cè)
Canny邊緣檢測(cè)是一種非常流行的邊緣檢測(cè)算法,是John Canny在1986年提出的。它是一個(gè)多階段的算法,即由多個(gè)步驟構(gòu)成。
1.圖像降噪2.計(jì)算圖像梯度3.非極大值抑制4.閾值篩選
首先,圖像降噪。我們知道梯度算子可以用于增強(qiáng)圖像,本質(zhì)上是通過增強(qiáng)邊緣輪廓來實(shí)現(xiàn)的,也就是說是可以檢測(cè)到邊緣的。但是,它們受噪聲的影響都很大。那么,我們第一步就是想到要先去除噪聲,因?yàn)樵肼暰褪腔叶茸兓艽蟮牡胤剑匀菀妆蛔R(shí)別為偽邊緣。
第二步,計(jì)算圖像梯度,得到可能邊緣。我們?cè)谇懊娴年P(guān)于《圖像梯度》文章中有所介紹,計(jì)算圖像梯度能夠得到圖像的邊緣,因?yàn)樘荻仁腔叶茸兓黠@的地方,而邊緣也是灰度變化明顯的地方。當(dāng)然這一步只能得到可能的邊緣。因?yàn)榛叶茸兓牡胤娇赡苁沁吘墸部赡懿皇沁吘墶_@一步就有了所有可能是邊緣的集合。
第三步,非極大值抑制。通常灰度變化的地方都比較集中,將局部范圍內(nèi)的梯度方向上,灰度變化最大的保留下來,其它的不保留,這樣可以剔除掉一大部分的點(diǎn)。將有多個(gè)像素寬的邊緣變成一個(gè)單像素寬的邊緣。即“胖邊緣”變成“瘦邊緣”。
第四步,雙閾值篩選。通過非極大值抑制后,仍然有很多的可能邊緣點(diǎn),進(jìn)一步的設(shè)置一個(gè)雙閾值,即低閾值(low),高閾值(high)。灰度變化大于high的,設(shè)置為強(qiáng)邊緣像素,低于low的,剔除。在low和high之間的設(shè)置為弱邊緣。進(jìn)一步判斷,如果其領(lǐng)域內(nèi)有強(qiáng)邊緣像素,保留,如果沒有,剔除。
這樣做的目的是只保留強(qiáng)邊緣輪廓的話,有些邊緣可能不閉合,需要從滿足low和high之間的點(diǎn)進(jìn)行補(bǔ)充,使得邊緣盡可能的閉合。
canny算子是怎么做的?簡(jiǎn)述Canny算子的計(jì)算步驟
①將彩色圖像轉(zhuǎn)化為灰度圖;②使用高斯濾波器平滑圖像;③計(jì)算圖像梯度的幅值和方向;④對(duì)梯度幅值進(jìn)行非極大值抑制;⑤使用雙閾值進(jìn)行邊緣的檢測(cè)和連接;Canny算子使用滯后閾值,滯后閾值需要兩個(gè)閾值(高閾值和低閾值)。如果某一像素位置的幅值超過 高 閾值, 該像素被保留為邊緣像素。如果某一像素位置的幅值小于 低 閾值, 該像素被排除。如果某一像素位置的幅值在兩個(gè)閾值之間,該像素僅僅在連接到一個(gè)高于 高 閾值的像素時(shí)被保留。
2.簡(jiǎn)述一下sobel算子
Sobel算子是一個(gè)主要用作邊緣檢測(cè)的離散微分算子(discrete differentiation operator)。它Sobel算子結(jié)合了高斯平滑和微分求導(dǎo),用來計(jì)算圖像灰度函數(shù)的近似梯度。在圖像的任何一點(diǎn)使用此算子,將會(huì)產(chǎn)生對(duì)應(yīng)的梯度矢量或是其法矢量。
當(dāng)內(nèi)核大小為 3 時(shí), 我們的Sobel內(nèi)核可能產(chǎn)生比較明顯的誤差(畢竟,Sobel算子只是求取了導(dǎo)數(shù)的近似值而已)。為解決這一問題,OpenCV提供了Scharr 函數(shù),但該函數(shù)僅作用于大小為3的內(nèi)核。該函數(shù)的運(yùn)算與Sobel函數(shù)一樣快,但結(jié)果卻更加精確。
3.簡(jiǎn)述傳統(tǒng)算法中邊緣檢測(cè)的一般步驟
①濾波:濾波去除噪聲;②增強(qiáng):增強(qiáng)邊緣的特征;③將邊緣通過某種方式提取出來,完成邊緣檢測(cè)。
4.如何求邊緣,45°邊緣
Sobel算子實(shí)現(xiàn)水平邊緣檢測(cè)、垂直邊緣檢測(cè);45度、135度角邊緣檢測(cè)。
5. SIFT
尺度不變特征變換(Scale-invariant feature transform, SIFT)是計(jì)算機(jī)視覺中一種檢測(cè)、描述和匹配圖像局部特征點(diǎn)的方法,通過在不同的尺度空間中檢測(cè)極值點(diǎn)或特征點(diǎn)(Conrner Point, Interest Point),提取出其位置、尺度和旋轉(zhuǎn)不變量,并生成特征描述子,最后用于圖像的特征點(diǎn)匹配。
SIFT特征是如何保持旋轉(zhuǎn)不變性的?
sift特征通過將坐標(biāo)軸旋轉(zhuǎn)至關(guān)鍵點(diǎn)的主方向來保持旋轉(zhuǎn)不變性,關(guān)鍵點(diǎn)的主方向是通過統(tǒng)計(jì)關(guān)鍵點(diǎn)局部鄰域內(nèi)像素梯度的方向分布直方圖的最大值得到的
SIFT特征匹配
對(duì)兩幅圖像中檢測(cè)到的特征點(diǎn),可采用特征向量的歐式距離作為特征點(diǎn)相似性的度量,取圖像1中某個(gè)關(guān)鍵點(diǎn),并在圖像2中找到與其距離最近的兩個(gè)關(guān)鍵點(diǎn),若最近距離與次近距離的比值小于某個(gè)閾值,則認(rèn)為距離最近的這一對(duì)關(guān)鍵點(diǎn)為匹配點(diǎn)。降低比例閾值,SIFT匹配點(diǎn)數(shù)量會(huì)減少,但相對(duì)而言會(huì)更加穩(wěn)定。閾值ratio的取值范圍一般為0.4~0.6。
SIFT特征的特點(diǎn)
SIFT是一種檢測(cè)、描述、匹配圖像局部特征點(diǎn)的算法,通過在尺度空間中檢測(cè)極值點(diǎn),提取位置、尺度、旋轉(zhuǎn)不變量,并抽象成特征向量加以描述,最后用于圖像特征點(diǎn)的匹配。SIFT特征對(duì)灰度、對(duì)比度變換、旋轉(zhuǎn)、尺度縮放等保持不變性,對(duì)視角變化、仿射變化、噪聲也具有一定的魯棒性。但其實(shí)時(shí)性不高,對(duì)邊緣光滑的目標(biāo)無法準(zhǔn)確提取特征點(diǎn)。
6.SURF特征匹配
加速魯棒特征(Speed Up Robust Feature, SURF)和SIFT特征類似,同樣是一個(gè)用于檢測(cè)、描述、匹配圖像局部特征點(diǎn)的特征描述子。SIFT是被廣泛應(yīng)用的特征點(diǎn)提取算法,但其實(shí)時(shí)性較差,如果不借助于硬件的加速和專用圖形處理器(GPUs)的配合,很難達(dá)到實(shí)時(shí)的要求。對(duì)于一些實(shí)時(shí)應(yīng)用場(chǎng)景,如基于特征點(diǎn)匹配的實(shí)時(shí)目標(biāo)跟蹤系統(tǒng),每秒要處理數(shù)十幀的圖像,需要在毫秒級(jí)完成特征點(diǎn)的搜索定位、特征向量的生成、特征向量的匹配以及目標(biāo)鎖定等工作,SIFT特征很難滿足這種需求。SURF借鑒了SIFT中近似簡(jiǎn)化(DoG近似替代LoG)的思想,將Hessian矩陣的高斯二階微分模板進(jìn)行了簡(jiǎn)化,借助于積分圖,使得模板對(duì)圖像的濾波只需要進(jìn)行幾次簡(jiǎn)單的加減法運(yùn)算,并且這種運(yùn)算與濾波模板的尺寸無關(guān)。SURF相當(dāng)于SIFT的加速改進(jìn)版本,在特征點(diǎn)檢測(cè)取得相似性能的條件下,提高了運(yùn)算速度。整體來說,SUFR比SIFT在運(yùn)算速度上要快數(shù)倍,綜合性能更優(yōu)。
7.LBP特征
局部二值模式(Local Binary Patter, LBP)是一種用來描述圖像局部紋理特征的算子,LBP特征具有灰度不變性和旋轉(zhuǎn)不變性等顯著優(yōu)點(diǎn),它將圖像中的各個(gè)像素與其鄰域像素值進(jìn)行比較,將結(jié)果保存為二進(jìn)制數(shù),并將得到的二進(jìn)制比特串作為中心像素的編碼值,也就是LBP特征值。LBP提供了一種衡量像素間鄰域關(guān)系的特征模式,因此可以有效地提取圖像的局部特征,而且由于其計(jì)算簡(jiǎn)單,可用于基于紋理分類的實(shí)時(shí)應(yīng)用場(chǎng)景,例如目標(biāo)檢測(cè)、人臉識(shí)別等。
8.圖像特征提取之HOG特征
方向梯度直方圖(Histogram of Oriented Gradient, HOG)特征是一種在計(jì)算機(jī)視覺和圖像處理中用來進(jìn)行物體檢測(cè)的特征描述子。它通過計(jì)算和統(tǒng)計(jì)圖像局部區(qū)域的梯度方向直方圖來構(gòu)成特征。Hog特征結(jié)合SVM分類器已經(jīng)被廣泛應(yīng)用于圖像識(shí)別中,尤其在行人檢測(cè)中獲得了極大的成功。
9.簡(jiǎn)要闡述一下SIFT和SURF算法的異同點(diǎn)
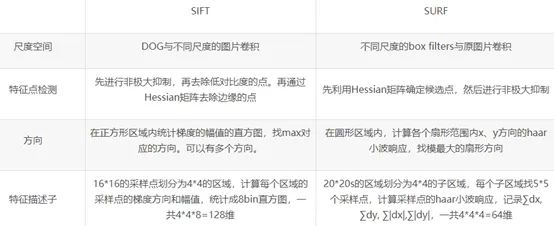
①尺度空間:SIFT使用DoG金字塔與圖像進(jìn)行卷積操作,而且對(duì)圖像有做降采樣處理;SURF是用近似DoH金字塔(即不同尺度的box filters)與圖像做卷積,借助積分圖,實(shí)際操作只涉及到數(shù)次簡(jiǎn)單的加減運(yùn)算,而且不改變圖像大小。
②特征點(diǎn)檢測(cè):SIFT是先進(jìn)行非極大值抑制,去除對(duì)比度低的點(diǎn),再通過Hessian矩陣剔除邊緣點(diǎn)。而SURF是計(jì)算Hessian矩陣的行列式值(DoH),再進(jìn)行非極大值抑制。
③特征點(diǎn)主方向:SIFT在方形鄰域窗口內(nèi)統(tǒng)計(jì)梯度方向直方圖,并對(duì)梯度幅值加權(quán),取最大峰對(duì)應(yīng)的方向;SURF是在圓形區(qū)域內(nèi),計(jì)算各個(gè)扇形范圍內(nèi)x、y方向的Haar小波響應(yīng)值,確定響應(yīng)累加和值最大的扇形方向。
④特征描述子:SIFT將關(guān)鍵點(diǎn)附近的鄰域劃分為4×4的區(qū)域,統(tǒng)計(jì)每個(gè)子區(qū)域的梯度方向直方圖,連接成一個(gè)4×4×8=128維的特征向量;SURF將20s×20s的鄰域劃分為4×4個(gè)子塊,計(jì)算每個(gè)子塊的Haar小波響應(yīng),并統(tǒng)計(jì)4個(gè)特征量,得到4×4×4=64維的特征向量。
總體來說,SURF和SIFT算法在特征點(diǎn)的檢測(cè)取得了相似的性能,SURF借助積分圖,將模板卷積操作近似轉(zhuǎn)換為加減運(yùn)算,在計(jì)算速度方面要優(yōu)于SIFT特征。
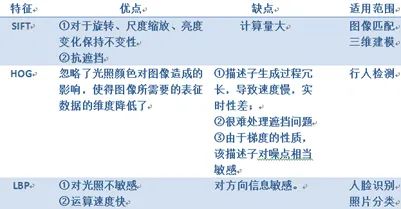
10.比較一下SIFT,HOG和LBP這三個(gè)特征提取算法
11.說出幾種傳統(tǒng)算法中常用的特征檢測(cè)算法
①FAST:Fast Feature Detector
②STAR:Star Feature Detector
③SIFT:Scale Invariant Feature Transform
④SURF:Speeded UP Robust Feature 加速版的具有魯棒性的特征檢測(cè)算法
⑤ORB:是Oriented Brief的簡(jiǎn)稱,是brief算法的改進(jìn)版,綜合性能相對(duì)較好的算法。
12.簡(jiǎn)述霍夫變換的原理
使用極坐標(biāo)表示一條直線,可以由參數(shù)極徑和極角(r,θ) 表示。霍夫變換就采用這種表示直線的方式。即r=xcosθ+ysinθ 意味著每一對(duì)(r,θ)代表一條通過點(diǎn)(x,y)的直線,如果對(duì)于一個(gè)給定點(diǎn)(x,y),我們?cè)跇O坐標(biāo)對(duì)極徑極角平面繪出通過它的直線,可以到一條正弦曲線(r>0 and 0<θ<2π)。對(duì)圖像上所有點(diǎn)進(jìn)行上述操作,如果兩個(gè)不同點(diǎn)進(jìn)行上述操作后發(fā)現(xiàn)曲線相交,則意味著他們通過同一條直線。
以上說明,一般來說,一條直線能夠通過在平面θ-r上尋找交于一點(diǎn)的曲線數(shù)量來檢測(cè)。越多曲線交于一點(diǎn)則意味著這個(gè)交點(diǎn)表示的直線由更多點(diǎn)組成。可以通過設(shè)置直線上點(diǎn)的閾值來定義多少條曲線交于一點(diǎn)才能被認(rèn)為是檢測(cè)到一條直線。
霍夫變換考察圖像中每個(gè)點(diǎn)對(duì)應(yīng)曲線間的交點(diǎn),如果交于一點(diǎn)的曲線的數(shù)量超過了閾值,則可以認(rèn)為這個(gè)交點(diǎn)所代表的參數(shù)對(duì)(r,θ)在原圖像中為一條直線。
13.簡(jiǎn)述霍夫圓變換原理
從平面坐標(biāo)圓上的點(diǎn)到極坐標(biāo)轉(zhuǎn)換的三個(gè)參數(shù)C(x0,y0,r)其中x0,y0是圓心,r 取一固定值時(shí)theta掃描360度,x y 跟著變化, 若多個(gè)邊緣點(diǎn)對(duì)應(yīng)的三維空間曲線交于一點(diǎn),則他們?cè)诠餐瑘A上,在圓心處有累積最大值,也可以用同樣的閾值的方法來判斷一個(gè)圓是否被檢測(cè)到。
14.簡(jiǎn)述opencv中主要有哪些模塊?
Core —— 核心組件模塊
作為核心組件,Core 做的事情肯定特別多,也比較基礎(chǔ)。包括基本數(shù)據(jù)結(jié)構(gòu)、動(dòng)態(tài)數(shù)據(jù)結(jié)構(gòu)、繪圖函數(shù)、數(shù)組操作相關(guān)函數(shù)、輔助功能與系統(tǒng)函數(shù)和宏、XML/YML、聚類、與OpenGL 的交互操作。
Imgproc 圖像處理模塊
包括圖像濾波、幾何圖像變換、混合圖像變換、直方圖、結(jié)構(gòu)分析及形狀描述、運(yùn)動(dòng)分析及目標(biāo)跟蹤、特征及目標(biāo)檢測(cè)。
Highgui——頂層GUI及視頻I/O
包括用戶界面、讀/寫圖像及視頻、QT新功能。
Video——視頻分析
包括運(yùn)動(dòng)分析及目標(biāo)跟蹤。
Calib3d——攝像機(jī)標(biāo)定及3維重建
包括攝像機(jī)標(biāo)定及3維重建。
Features2d——2維特征框架
包括特征檢測(cè)與描述、特征檢測(cè)提取匹配接口、關(guān)鍵點(diǎn)與匹配點(diǎn)繪圖及對(duì)象分類。
Objdetect——目標(biāo)檢測(cè)
包括級(jí)聯(lián)分類器及SVM.
MI——機(jī)器學(xué)習(xí)
包括統(tǒng)計(jì)模型、貝葉斯分類器、最近鄰分類器、支持向量機(jī)、決策樹、提升、梯度提升樹、隨機(jī)樹、超隨機(jī)樹、最大期望、神經(jīng)網(wǎng)絡(luò)及機(jī)器學(xué)習(xí)數(shù)據(jù)。
FLann——聚類及多維空間搜索
快速最近鄰搜索及聚類。
Gpu——計(jì)算機(jī)視覺中GPU加速
GPU模塊及數(shù)據(jù)結(jié)構(gòu),包含圖像處理與分析模塊。
Photo——計(jì)算圖像
圖像修復(fù)及去噪。
Stitching——圖像拼接
圖像拼接頂層操作函數(shù)、旋轉(zhuǎn)、自動(dòng)標(biāo)定、仿射變換、接縫估計(jì)、曝光補(bǔ)充及圖像融合技術(shù)。
15. opencv中CV_8UC3代表什么意思?
8表示8位,UC--代表--unsigned int--無符號(hào)整形,3 -代表一張圖片的通道數(shù)3
16.簡(jiǎn)述opencv中的Scalar類
Scalar()表示具有4個(gè)元素的數(shù)組,在opencv中被大量用于傳遞像素值,比如RGB顏色值。如果用不到第四個(gè)參數(shù),則不需要寫出來,若只寫三個(gè)參數(shù),則opencv會(huì)認(rèn)為只需要傳遞三個(gè)參數(shù)。
17.簡(jiǎn)述.hpp和.h的區(qū)別
.hpp,本質(zhì)就是將.cpp的實(shí)現(xiàn)代碼混入.h頭文件當(dāng)中,定義與實(shí)現(xiàn)都包含在同一文件,則該類的調(diào)用者只需要include該.hpp文件即可,無需再將cpp加入到project中進(jìn)行編譯。而實(shí)現(xiàn)代碼將直接編譯到調(diào)用者的obj文件中,不再生成單獨(dú)的obj,采用hpp將大幅度減少調(diào)用project中的cpp文件數(shù)與編譯次數(shù),也不用再發(fā)布lib與dll文件,因此非常適合用來編寫公用的開源庫。
18.簡(jiǎn)述一下什么是光流?
光流(Optical flow or optic flow)是關(guān)于視域中的物體運(yùn)動(dòng)檢測(cè)中的概念。用來描述相對(duì)于觀察者的運(yùn)動(dòng)所造成的觀測(cè)目標(biāo)、表面或邊緣的運(yùn)動(dòng)。
19.簡(jiǎn)述常見的顏色系統(tǒng)
①RGB是最常見的顏色系統(tǒng),采用人眼相似的工作機(jī)制,也被顯示設(shè)備所采用。②HSV和HLS把顏色分解成色調(diào),飽和度和亮度/明度,描述顏色更加自然,可以通過拋棄最后一個(gè)元素使算法對(duì)輸入圖像的光照條件不敏感。③YCrCb顏色系統(tǒng)在JPEG圖像格式中廣泛使用。④CIELab是一種在感知上均勻的顏色空間,適合用來度量?jī)蓚€(gè)顏色之間的距離。
20.簡(jiǎn)述訪問圖像中像素的3種方法
①指針訪問,C操作符[];②迭代器iterator;③動(dòng)態(tài)地址計(jì)算。
21.簡(jiǎn)述一下圖像處理中的膨脹和腐蝕操作
膨脹和腐蝕都是對(duì)白色(高亮)部分進(jìn)行操作的。膨脹是圖像中的高亮部分進(jìn)行膨脹,效果圖擁有比原圖更大的高亮區(qū)域,腐蝕是原圖中的高亮部分被腐蝕,效果圖擁有比原圖更小的高亮區(qū)域。從數(shù)學(xué)原理上說,膨脹就是求局部最大值,并把這個(gè)最大值賦值給參考點(diǎn)指定像素,這樣會(huì)使圖像中高亮區(qū)域逐漸增長(zhǎng),腐蝕與之相反。
22.簡(jiǎn)述開運(yùn)算的操作流程和使用場(chǎng)景
開運(yùn)算就是先腐蝕后膨脹的過程。可以用來消除小物體,在纖細(xì)點(diǎn)處分離物體,并且在平滑較大物體的邊界的同時(shí)不明顯改變其面積。
23.簡(jiǎn)述閉運(yùn)算的操作流程和使用場(chǎng)景
閉運(yùn)算就是先膨脹后腐蝕的過程,閉運(yùn)算能夠排除小型黑洞(黑色區(qū)域)。
24.簡(jiǎn)述形態(tài)學(xué)梯度的定義和使用場(chǎng)景
形態(tài)學(xué)梯度是膨脹圖與腐蝕圖之差,對(duì)二值圖進(jìn)行這一操作可以將團(tuán)塊(blob)的邊緣突出出來,可以用形態(tài)學(xué)梯度來保留物體的邊緣輪廓。
25.簡(jiǎn)述頂帽(禮帽)運(yùn)算的定義和使用場(chǎng)景
頂帽是原圖像與開運(yùn)算的結(jié)果圖之差。因?yàn)殚_運(yùn)算的結(jié)果是放大了裂縫或者局部低亮度的區(qū)域,所以從原圖中減去開運(yùn)算之后的圖,得到的效果圖突出了比原圖輪廓周圍區(qū)域更加明亮的區(qū)域。頂帽運(yùn)算常用來分離比臨近點(diǎn)亮一些的斑塊。在一幅圖像具有大幅的背景,而微小物品比較有規(guī)律的情況下,可以使用頂帽運(yùn)算進(jìn)行背景提取。
26.簡(jiǎn)述黑帽運(yùn)算的定義和使用場(chǎng)景
黑帽(Black Hat)運(yùn)算為閉運(yùn)算結(jié)果圖與原圖像之差。黑帽運(yùn)算后的效果圖突出了比原圖輪廓周圍的區(qū)域更暗的區(qū)域,且這一操作和選擇的核的大小相關(guān)。所以,黑帽運(yùn)算用來分離比鄰近點(diǎn)暗一些的斑塊。效果圖有著非常完美的輪廓。
27.簡(jiǎn)述一下漫水填充法
漫水填充法是一種用特定的顏色填充算法填充連通區(qū)域,通過設(shè)置可連通像素的上下限以及連通方式來達(dá)到不同的填充效果的方法。漫水填充經(jīng)常用來標(biāo)記或者分離圖像的一部分進(jìn)行處理或分析。簡(jiǎn)單說,就是自動(dòng)選中和種子點(diǎn)相連的區(qū)域,接著將該區(qū)域替換成指定的顏色。
28.簡(jiǎn)述一下仿射變換的定義
仿射變換,又稱仿射映射,是指在幾何中,一個(gè)向量空間進(jìn)行一次線性變換并接上一個(gè)平移,變換為另一個(gè)向量空間的過程。它保持了二維圖形的平直性(直線變換之后依然是直線)和平行性。一個(gè)任意的仿射變換都能表示為乘以一個(gè)矩陣(線性變換)接著再加上一個(gè)向量(平移)的形式。
29.簡(jiǎn)述一些圖像金字塔的種類和區(qū)別
一般情況下有兩種類型的圖像金字塔,分別是:高斯金字塔(Gaussianpyramid): 用來向下采樣,主要的圖像金字塔;拉普拉斯金字塔(Laplacianpyramid): 用來從金字塔低層圖像重建上層未采樣圖像,在數(shù)字圖像處理中也即是預(yù)測(cè)殘差,可以對(duì)圖像進(jìn)行最大程度的還原,配合高斯金字塔一起使用。兩者的簡(jiǎn)要區(qū)別:高斯金字塔用來向下降采樣圖像,拉普拉斯金字塔用來從金字塔低層圖形中向上采樣,重建一個(gè)圖像可以將拉普拉斯金字塔理解為高斯金字塔的逆形式。
30.簡(jiǎn)述凸包的定義
給定二維平面上的點(diǎn)集,凸包就是將最外層的點(diǎn)連接起來構(gòu)成的凸多邊形,它能包含點(diǎn)集中所有的點(diǎn)。理解物體形狀或輪廓的一種比較有用的方法便是計(jì)算一個(gè)物體的凸包。
31.簡(jiǎn)述反向投影的定義和使用場(chǎng)景
反向投影是一種記錄給定圖像中的像素點(diǎn)如何適應(yīng)直方圖模型像素分布的方式。簡(jiǎn)單的講,就是首先計(jì)算某一特征的直方圖模型,然后使用模型去尋找圖像中存在的該特征。反向投影用于在輸入圖像(通常較大)中查找與特定圖像(通常較小)最匹配的點(diǎn)或者區(qū)域,也就是定位模板圖像出現(xiàn)在輸入圖像的位置。
32.簡(jiǎn)述harris角點(diǎn)檢測(cè)算法原理和使用場(chǎng)景
harris角點(diǎn)檢測(cè)時(shí)一種直接基于灰度圖像的角點(diǎn)提取算法,穩(wěn)定性高,尤其對(duì)于L型角點(diǎn)檢測(cè)精度高。但是由于采用了高斯濾波,運(yùn)算速度相對(duì)比較的慢,角點(diǎn)信息有丟失和位置偏移的現(xiàn)象,而且角點(diǎn)提取有聚簇現(xiàn)象。
33.簡(jiǎn)述一下分水嶺算法
分水嶺算法是一種圖像區(qū)域分割法,在分割的過程中,它會(huì)把跟臨近像素間的相似性作為重要的參考依據(jù),從而將在空間位置上相近并且灰度值相近的像素點(diǎn)互相連接起來構(gòu)成一個(gè)封閉的輪廓,封閉性是分水嶺算法的一個(gè)重要特征。分水嶺算法常用的操作步驟:分水嶺算法常用的操作步驟:彩色圖像灰度化,然后再求梯度圖,最后在梯度圖的基礎(chǔ)上進(jìn)行分水嶺算法,求得分段圖像的邊緣線。
參考鏈接
本文亮點(diǎn)總結(jié)
如果覺得有用,就請(qǐng)分享到朋友圈吧!
個(gè)人微信(如果沒有備注不拉群!) 請(qǐng)注明:地區(qū)+學(xué)校/企業(yè)+研究方向+昵稱
下載1:何愷明頂會(huì)分享
在「AI算法與圖像處理」公眾號(hào)后臺(tái)回復(fù):何愷明,即可下載。總共有6份PDF,涉及 ResNet、Mask RCNN等經(jīng)典工作的總結(jié)分析
下載2:終身受益的編程指南:Google編程風(fēng)格指南
在「AI算法與圖像處理」公眾號(hào)后臺(tái)回復(fù):c++,即可下載。歷經(jīng)十年考驗(yàn),最權(quán)威的編程規(guī)范!
下載3 CVPR2021 在「AI算法與圖像處理」公眾號(hào)后臺(tái)回復(fù):CVPR,即可下載1467篇CVPR 2020論文 和 CVPR 2021 最新論文
點(diǎn)亮  ,告訴大家你也在看
,告訴大家你也在看