
基于OpenCV的實戰(zhàn):輪廓檢測(附代碼解析)
點擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時間送達(dá)

cx = int(M ['m10'] / M ['m00'])
cy = int(M ['m01'] / M ['m00'])
獲得質(zhì)心點后,此質(zhì)心點將表示對象這樣就可以為與質(zhì)心相對應(yīng)的對象放置一個邊界框。本次實驗我們將使用橙色作為對象,首先我們需要安裝打包的OpenCV和numpy軟件包。
import cv2import numpy as np
插入圖片使用“ cv2.imread()”:
#Read Picturesimg = cv2.imread('jeruk.png')
然后將RGB轉(zhuǎn)換為HSV并創(chuàng)建黃色(橙色為右黃色)顏色分割:
#Convert RGB to HSVhsv = cv2.cvtColor(img,cv2.COLOR_BGR2HSV)#Range of yellow color segmentation / classificationlower = np.array([20,100,100], dtype=np.uint8)upper = np.array([40,255,255], dtype=np.uint8)mask = cv2.inRange(hsv, lower, upper)kernel = np.ones((25,25),np.uint8)
進(jìn)行對象像素的增厚,然后減小尺寸,以使對象像素彼此不靠近:
# Thicken object pixelsdilation = cv2.dilate(mask,kernel,iterations = 1)# Minimized the object pixels so they're not stick togethererosion = cv2.erode(img,kernel,iterations = 1)
找到橙色的輪廓和陣列:
#Find Contourscontours, hierarchy = cv2.findContours(dilation,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)#Array Contourscontour = []
然后將原始圖像復(fù)制到“ resultImg”變量:
#copy the original image to "resultImg"resultImg = (img).copy()
對輪廓進(jìn)行迭代:
for i in range(len(contours)):#amount contours to cnt variablecnt = contours[i](x,y),radius = cv2.minEnclosingCircle(cnt)center = (int(x),int(y))if(int(radius) > 1):contour.append(cnt)resultImg = cv2.circle(resultImg,center,int(radius,(255,0,0),3)
最后一個階段,顯示檢測結(jié)果的輪廓:
#displays resultscv2.imshow('image',resultImg)cv2.waitKey(0)cv2.destroyAllWindows()
輸出結(jié)果:
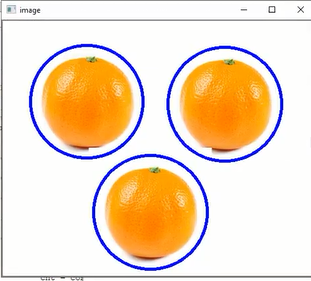
根據(jù)前面顯示的橙色檢測結(jié)果,可以通過輪廓檢測橙色,該輪廓由橙色對象上存在藍(lán)色圓圈標(biāo)記。
— — 完 — —
交流群
歡迎加入公眾號讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動駕駛、計算攝影、檢測、分割、識別、醫(yī)學(xué)影像、GAN、算法競賽等微信群(以后會逐漸細(xì)分),請掃描下面微信號加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺SLAM“。請按照格式備注,否則不予通過。添加成功后會根據(jù)研究方向邀請進(jìn)入相關(guān)微信群。請勿在群內(nèi)發(fā)送廣告,否則會請出群,謝謝理解~
評論
圖片
表情