
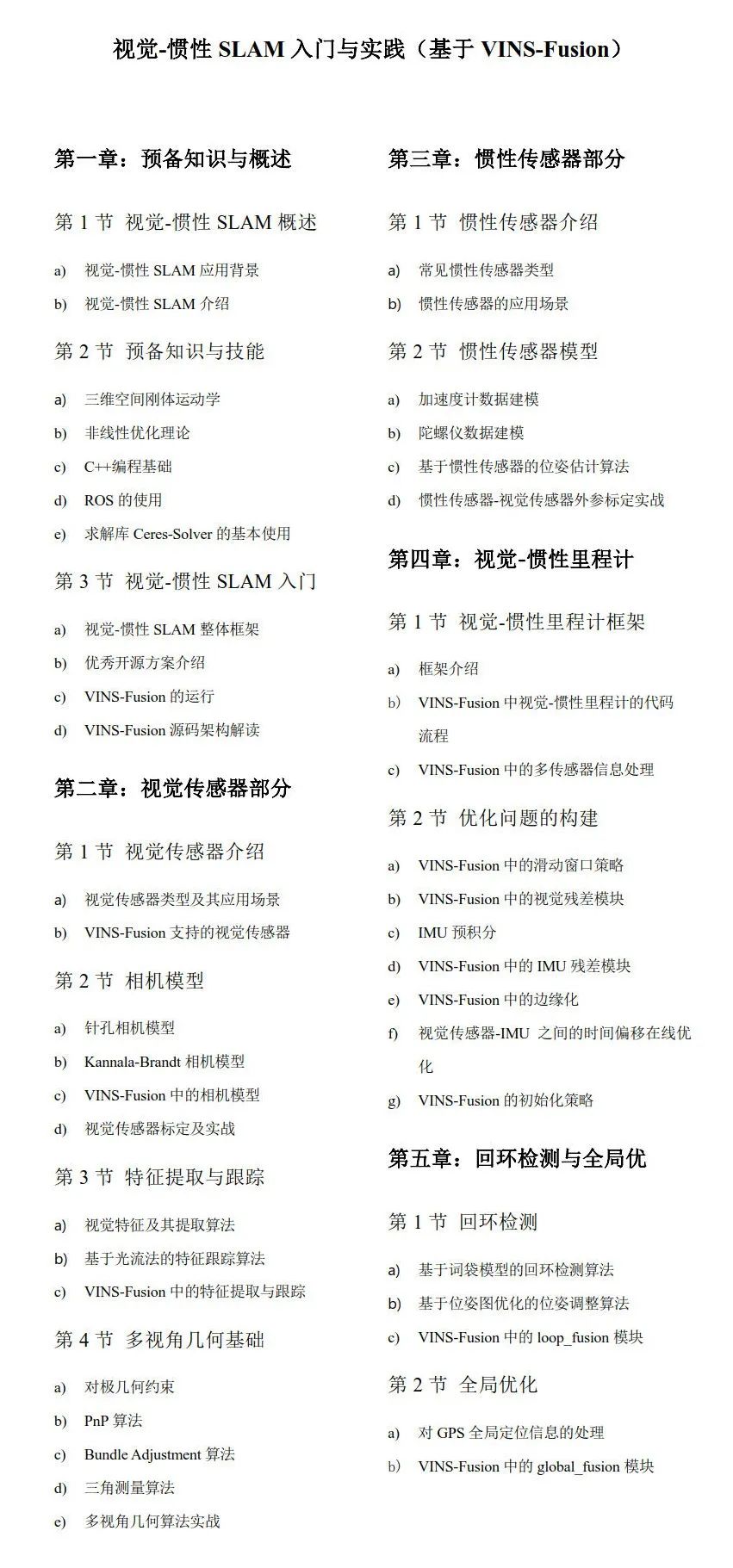
徹底搞懂視覺(jué)-慣性SLAM:基于VINS-Fusion(正式開(kāi)課)


自動(dòng)駕駛和服務(wù)機(jī)器人行業(yè)增速明顯,自2021年以來(lái),多家公司開(kāi)始逐步落地自己的L2~L4級(jí)別的輔助/自動(dòng)駕駛產(chǎn)品(無(wú)人出租車或者配送機(jī)器人),如百度、滴滴、美團(tuán)、華為、特斯拉、Waymo等。其中,基于視覺(jué)傳感器和慣性傳感器的同時(shí)定位與建圖技術(shù)(SLAM)是該領(lǐng)域的核心技術(shù)之一,各大公司均有相關(guān)在招崗位。由于視覺(jué)-慣性SLAM對(duì)從業(yè)者的理論和代碼要求都很高,導(dǎo)致行業(yè)人才供小于求,許多公司更是不惜重金招聘一個(gè)合格的SLAM算法工程師,并且薪資待遇極其豐厚。以下是某照片網(wǎng)站對(duì)SLAM相關(guān)職位的要求和待遇:


 視覺(jué)SLAM由于成本低,單目/雙目結(jié)合多傳感器的方案越來(lái)越受青睞,而視覺(jué)慣性里程計(jì)更是多傳感融合方案的佼佼者;其中,最著名的方案當(dāng)屬VINS-Fusion(VINS-Mono的擴(kuò)展版)。VINS-Fusion是香港科技大學(xué)于2019年開(kāi)源的視覺(jué)-慣性SLAM系統(tǒng),KITTI Visual Odometry 榜單中排名最靠前的開(kāi)源雙目 VO 方案,主要支持:?jiǎn)文?IMU、純雙目、雙目+IMU、雙目+IMU+GPS,是一個(gè)可以用于室外場(chǎng)景中無(wú)人車輛/機(jī)器人自主定位的優(yōu)秀方案,以下是官方測(cè)試效果展示:
視覺(jué)SLAM由于成本低,單目/雙目結(jié)合多傳感器的方案越來(lái)越受青睞,而視覺(jué)慣性里程計(jì)更是多傳感融合方案的佼佼者;其中,最著名的方案當(dāng)屬VINS-Fusion(VINS-Mono的擴(kuò)展版)。VINS-Fusion是香港科技大學(xué)于2019年開(kāi)源的視覺(jué)-慣性SLAM系統(tǒng),KITTI Visual Odometry 榜單中排名最靠前的開(kāi)源雙目 VO 方案,主要支持:?jiǎn)文?IMU、純雙目、雙目+IMU、雙目+IMU+GPS,是一個(gè)可以用于室外場(chǎng)景中無(wú)人車輛/機(jī)器人自主定位的優(yōu)秀方案,以下是官方測(cè)試效果展示:
幾種方案效果對(duì)比
課程優(yōu)勢(shì)
2021年8月29日正式開(kāi)課,歷時(shí)三個(gè)月,每?jī)芍芨乱淮危唧w時(shí)間以學(xué)習(xí)群內(nèi)公告為主。
點(diǎn)擊購(gòu)買與咨詢
群號(hào):910070197
▲課程咨詢QQ群,了解更多
評(píng)論
圖片
表情