
【SLAM】視覺SLAM:一直在入門,從未到精通
點(diǎn)擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)
上周的組會(huì)上,我給研一的萌新們講解什么是SLAM,為了能讓他們在沒有任何基礎(chǔ)的情況下大致聽懂,PPT只能多圖少字沒公式,這里我就把上周的組會(huì)匯報(bào)總結(jié)一下。
這次匯報(bào)的題目我定為“視覺SLAM:一直在入門,從未到精通”,那是因?yàn)橐曈XSLAM真的是博大精深,就像C++一樣,連說入門都底氣不足,只能說了解,更不敢說精通。
從五月份開始學(xué)《視覺SLAM十四講》算起,我已經(jīng)正式接觸SLAM四個(gè)多月了,到現(xiàn)在還是很懵懂的,當(dāng)然也有可能是自己的吸收能力還不夠強(qiáng)吧!
下面就以我這段時(shí)間的積累斗膽簡單談?wù)剬σ曈XSLAM的認(rèn)識,如有不當(dāng),還請指教。
?
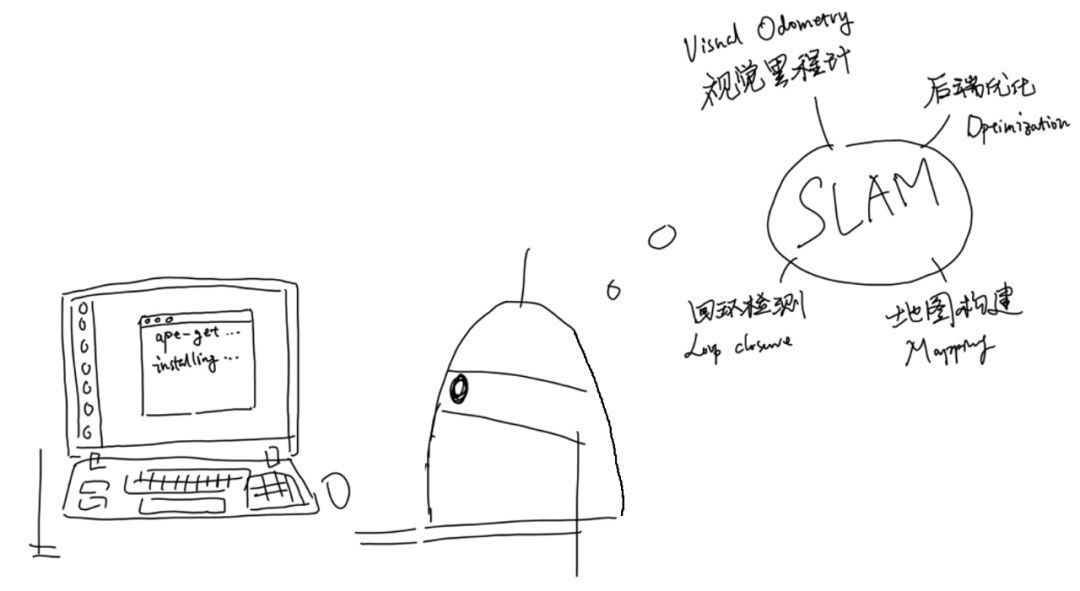
SLAM的英文全名叫做Simultaneous Localization and Mapping,中文名是同時(shí)定位與建圖,從字面上來看就是同時(shí)解決定位和地圖構(gòu)建問題。
定位主要是解決“在什么地方”的問題,比如你目前在哪國哪省哪市哪區(qū)哪路哪棟幾號幾樓哪個(gè)房間哪個(gè)角落。
建圖主要是解決“周圍環(huán)境是什么樣”的問題,你可以回憶一下百度高德地圖,甚至一些景點(diǎn)的手繪地圖。
下面就以掃地機(jī)器人作為例子再稍微詳細(xì)地講解一下。

對于掃地機(jī)器人來說,定位就是要知道自己在房間里的具體位置,建圖就是知道整個(gè)房間的地面結(jié)構(gòu)信息,而有了這些信息才能做路徑規(guī)劃,以最短的距離到達(dá)目的地。
下面右圖就是掃地機(jī)器人在家里移動(dòng)時(shí)的定位和建圖,藍(lán)點(diǎn)是它自己目前所在的位置,它已經(jīng)把房間能抵達(dá)的地方都構(gòu)建出來了。

總的來說,機(jī)器人從未知環(huán)境未知地點(diǎn)出發(fā),通過傳感器(這里主要說的是相機(jī))觀測環(huán)境獲取信息,利用相機(jī)的信息估算機(jī)器人的位置、姿態(tài)和運(yùn)動(dòng)軌跡,并且根據(jù)位姿構(gòu)建地圖,從而實(shí)現(xiàn)同時(shí)定位和建圖。
利用不同的傳感器實(shí)現(xiàn)SLAM的方法不同,目前主流的傳感器有激光雷達(dá)(LiDAR SLAM)、相機(jī)(Visual SLAM)和慣性測量單元(Visual-inertial SLAM)。
接下來我們介紹的是視覺SLAM的方法,也就是只采用相機(jī)作為傳感器的SLAM。
當(dāng)然,用相機(jī)作為傳感器的話,還是有不同的方法,因?yàn)橄鄼C(jī)也有不同的種類,常見的有單目相機(jī)、雙目相機(jī)和RGB-D相機(jī)。

可能你會(huì)有疑問了,為什么不用GPS定位?為什么不用現(xiàn)成的地圖?下面就來一一解答。
對于定位來說,我要反問一下,沒有GPS怎么破?比如在一些建筑物內(nèi)、隧道或者偏遠(yuǎn)地方,我們是無法獲取GPS的。這種情況下機(jī)器人或者無人車是不是得自己定位了。
再者,GPS的定位精度不夠高,最多也就達(dá)到幾米的精度,要是在室內(nèi)定位的話,一套房就這么巴掌大的地方,幾米的誤差也許就讓你的掃地機(jī)器人誤以為是在你鄰居家打掃了。。
對于建圖來說,我還是要反問一下,沒有現(xiàn)成地圖怎么破?比如你的家、公司或者工廠,我們很難直接拿到現(xiàn)成的地圖,家家戶戶的圖紙數(shù)據(jù)量得多大,而且每一戶裝修也不一樣,家私的擺放位置更是無從得知。
而且,不同場景需求下的地圖也是不一樣的,后面我們會(huì)提到有各式各樣的地圖,不存在解決各種問題的地圖。
所以,在沒有GPS和現(xiàn)成地圖的場景下,同時(shí)考慮到定位的精度和地圖的需求,SLAM對于機(jī)器人來說簡直是雪中送炭。
下面就用高博《視覺SLAM十四講》里的框圖來講解視覺SLAM大致是怎么實(shí)現(xiàn)的。
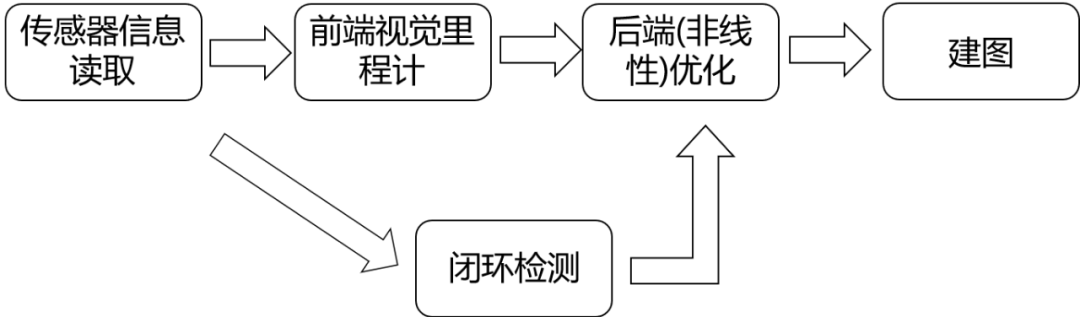
首先通過傳感器(這里利用的是相機(jī))獲取環(huán)境中的數(shù)據(jù)信息,也就是一幀一幀的圖像,在前端視覺里程計(jì)中通過這些圖像信息計(jì)算出相機(jī)的位置(準(zhǔn)確來說是位姿,后面會(huì)細(xì)說)。
同時(shí)進(jìn)行閉環(huán)檢測,判斷機(jī)器人是否到達(dá)先前經(jīng)過的地方。然后利用后端非線性優(yōu)化,對前端得出的相機(jī)位姿進(jìn)行優(yōu)化,得到全局最優(yōu)的狀態(tài)。
最后根據(jù)每一時(shí)刻的相機(jī)位姿和空間中目標(biāo)的信息,根據(jù)需求建立相應(yīng)的地圖。
接下來就來詳細(xì)說說其中每一個(gè)模塊都是怎么操作的。
視覺里程計(jì)的英文名稱是Visual Odometry,簡稱VO,主要是研究怎么通過相鄰兩幀圖像計(jì)算兩幀之間相機(jī)的運(yùn)動(dòng)。
這里面涉及了不少知識,其中包括圖像處理中的特征提取和特征匹配、三維視覺中的剛體運(yùn)動(dòng)和對極幾何、數(shù)學(xué)中的李群李代數(shù)等等。。
不要慌!天空飄來五個(gè)字,那都不是事!
在視覺SLAM中,主流的方法根據(jù)前端的不同分為特征點(diǎn)法和直接法,下面介紹的是利用特征點(diǎn)法的視覺SLAM。
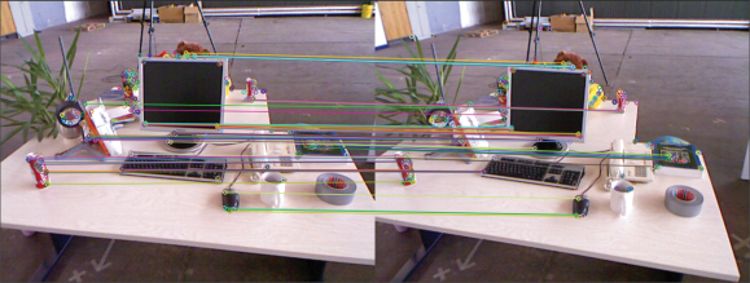
你瞅瞅,下面的兩幀圖像之間相機(jī)進(jìn)行了怎樣的運(yùn)動(dòng)?

對于我們?nèi)搜壑庇^判斷來說,從前一張圖像到后一張圖像應(yīng)該是往右上的方向稍微旋轉(zhuǎn)了一下。
但是,對于機(jī)器人來說它可沒那么“直觀”。
首先它要對這兩張圖像進(jìn)行特征提取,也就是找到圖像中特別的地方,比如角點(diǎn)、邊緣點(diǎn)等。然后,對這些特征點(diǎn)在兩張圖像之間進(jìn)行特征匹配。
把匹配對中誤匹配的篩選掉之后,就能得到較為準(zhǔn)確的匹配了,如下圖。
有了這些匹配點(diǎn)對之后,就能利用它們瘋狂計(jì)算相機(jī)的位姿了。對了,這里得講講位姿究竟是什么東西?
位姿其實(shí)就是位置和姿態(tài)的合稱,位置也就是在三維空間中的坐標(biāo)(x,y,z),而姿態(tài)是在三維空間中的旋轉(zhuǎn)(r,p,y),因此位姿總共包含6個(gè)自由度。
還沒理解?來做做頭部健康運(yùn)動(dòng)就明白了,左右歪頭,上下點(diǎn)頭,左右搖頭。怎么樣,既能預(yù)防頸椎病,還能理解三維旋轉(zhuǎn)。
左右歪頭是滾轉(zhuǎn)角roll,上下點(diǎn)頭是俯仰角pitch,左右搖頭則是偏航角yaw。
既然要表示坐標(biāo),那我們總得知道坐標(biāo)系是什么吧?在相機(jī)運(yùn)動(dòng)過程中,有四個(gè)常見的坐標(biāo)系需要我們了解。
分別是世界坐標(biāo)系、相機(jī)坐標(biāo)系、歸一化坐標(biāo)系還有像素坐標(biāo)系。下面這張圖讓人一目了然。
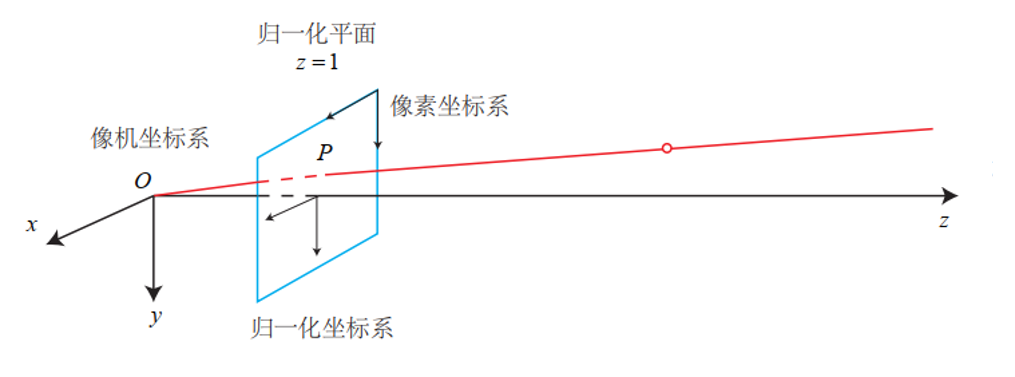
世界坐標(biāo)系比較好理解,就是我們身處的整個(gè)三維空間的坐標(biāo)系,坐標(biāo)原點(diǎn)由我們自己定,可以是某一張桌子的邊角,也可以是相機(jī)第一時(shí)刻的位置。
相機(jī)坐標(biāo)系是以相機(jī)光心為坐標(biāo)原點(diǎn),光軸為z軸的坐標(biāo)系。
歸一化坐標(biāo)系就是原點(diǎn)在相機(jī)坐標(biāo)系下(0,0,1)處的二維平面坐標(biāo)系。
像素坐標(biāo)系是以圖像左上角的像素為原點(diǎn),以一個(gè)像素為最小單元的離散坐標(biāo)系。
既然有不同的坐標(biāo),當(dāng)知道點(diǎn)在一個(gè)坐標(biāo)系下的坐標(biāo)時(shí),如何求得該點(diǎn)在其他坐標(biāo)系下的坐標(biāo)呢?
舉個(gè)栗子,我們能獲取到的是圖像的像素信息,通過轉(zhuǎn)換(相機(jī)投影模型)之后能得到該像素(特征點(diǎn))在相機(jī)坐標(biāo)系中的坐標(biāo)位置。
但是在構(gòu)建地圖的時(shí)候我們得知道這個(gè)像素(特征點(diǎn))在整個(gè)三維空間中的哪個(gè)位置呀,也就是相機(jī)坐標(biāo)系中的坐標(biāo)怎么轉(zhuǎn)化到世界坐標(biāo)系下。
這就涉及到了三維空間剛體運(yùn)動(dòng)中坐標(biāo)系的變換。直接上圖就曉得了。
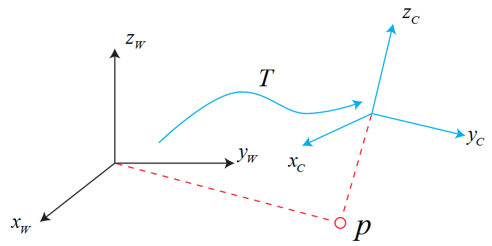
上圖展示的是世界坐標(biāo)系轉(zhuǎn)化為相機(jī)坐標(biāo)系的過程,當(dāng)然方法都是一樣的。
這里獻(xiàn)上整篇文章唯一的一條數(shù)學(xué)公式:
pc是點(diǎn)p在相機(jī)坐標(biāo)系下的坐標(biāo),pw是世界坐標(biāo),Rcw是描述從世界坐標(biāo)系轉(zhuǎn)化為相機(jī)坐標(biāo)系旋轉(zhuǎn)的旋轉(zhuǎn)矩陣,tcw是描述從世界坐標(biāo)系轉(zhuǎn)化相機(jī)坐標(biāo)系平移的平移向量。
可以看出,坐標(biāo)系的轉(zhuǎn)換我們可以用一個(gè)旋轉(zhuǎn)矩陣R(3*3)來表示旋轉(zhuǎn),也就是決定姿態(tài),還有一個(gè)平移向量t(3*1)來表示平移,也就是決定位置。
相機(jī)的位姿其實(shí)就是指相機(jī)在世界坐標(biāo)系下的位置坐標(biāo)和旋轉(zhuǎn)姿態(tài),位姿估計(jì)就是根據(jù)兩幀之間匹配點(diǎn)的關(guān)系計(jì)算當(dāng)前時(shí)刻相機(jī)的位姿。
假如我們將第一幀時(shí)刻的相機(jī)作為世界坐標(biāo)系原點(diǎn),那么通過第1、2幀圖像的匹配點(diǎn)就可以計(jì)算從第2幀相機(jī)坐標(biāo)系到第1幀相機(jī)坐標(biāo)系(世界坐標(biāo)系)的旋轉(zhuǎn)矩陣R12和平移向量t12。
然后再通過第2、3幀圖像的匹配點(diǎn)計(jì)算R23和t23,利用和R12相乘再加上t12就能求得第3幀時(shí)刻相機(jī)在世界坐標(biāo)系下的位姿。依此類推。。。
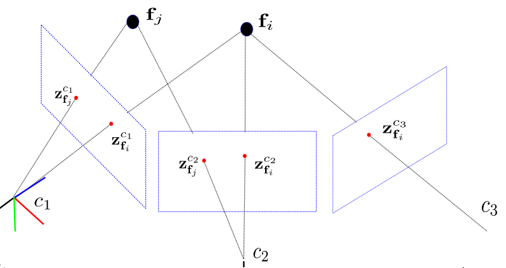
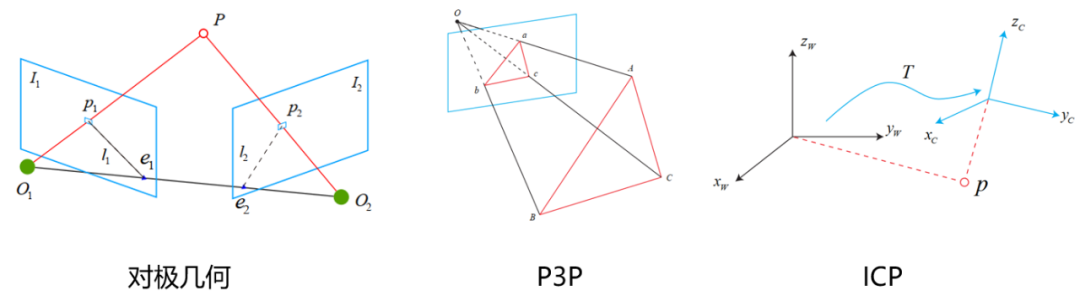
當(dāng)然,根據(jù)不同情況可以用不同的方法求R和t:
2D-2D:對極約束,在單目相機(jī)中,我們只能獲取二維圖像,利用兩幀圖像的匹配點(diǎn)關(guān)系通過對極幾何的關(guān)系可以求出一個(gè)叫本質(zhì)矩陣E的東西,再求得R和t。
3D-3D:ICP(迭代最近法),在雙目和RGB-D相機(jī)中,我們可以直接獲取圖像的深度信息,也就是說特征點(diǎn)在相機(jī)坐標(biāo)系下的z我們是知道的,這時(shí)候其實(shí)就相當(dāng)于直接求兩個(gè)相機(jī)坐標(biāo)系的轉(zhuǎn)換R和t。
3D-2D:PnP,當(dāng)我們知道一組點(diǎn)在世界坐標(biāo)系下的坐標(biāo)和它們在相機(jī)中的投影位置時(shí),可以利用這種方法直接求得當(dāng)前時(shí)刻的相機(jī)位姿。
視覺里程計(jì)講得很多了,但是從視覺里程計(jì)中計(jì)算得到的相機(jī)位姿會(huì)有一定的誤差,一次兩次還好,一旦多了累積誤差可是很嚴(yán)重的。
這時(shí)就需要后端對前端的結(jié)果進(jìn)行優(yōu)化,從而得到最優(yōu)的位姿。
和前端分為兩種主流方法一樣,后端也有兩種解決方法:
濾波器方法,以擴(kuò)展卡爾曼濾波(EKF)為代表,認(rèn)為某一時(shí)刻的狀態(tài)只和上一時(shí)刻的狀態(tài)有關(guān)。
非線性優(yōu)化方法,以高斯牛頓法和列文伯格-馬夸爾特法為代表,認(rèn)為某一時(shí)刻的狀態(tài)和之前所有狀態(tài)有關(guān)。
我們主要用的是非線性優(yōu)化方法,對相機(jī)位姿和路標(biāo)點(diǎn)構(gòu)建最小二乘問題,并利用圖優(yōu)化的方法求解,也就是常說的Bundle Adjustment。
當(dāng)然,因?yàn)锽A處理的數(shù)據(jù)量很大,在整個(gè)SLAM過程中還會(huì)采取別的方法控制優(yōu)化的數(shù)據(jù),比如滑動(dòng)窗口法。
簡單地說,就是在保持處理的幀數(shù)不變的情況下,將舊的數(shù)據(jù)刪除,加入新的數(shù)據(jù)。
假設(shè)每次只優(yōu)化10幀,那么當(dāng)接收到第11幀圖像時(shí),移除第1幀圖像的數(shù)據(jù),并將第11幀圖像加入優(yōu)化問題中。

回環(huán)檢測(Loop Closure)是一個(gè)挺特殊的模塊,主要讓機(jī)器人能識別出曾經(jīng)去過的地方。
隨著時(shí)間推進(jìn),SLAM的誤差會(huì)不斷地累積,時(shí)間久了后,使得軌跡出現(xiàn)嚴(yán)重的漂移。
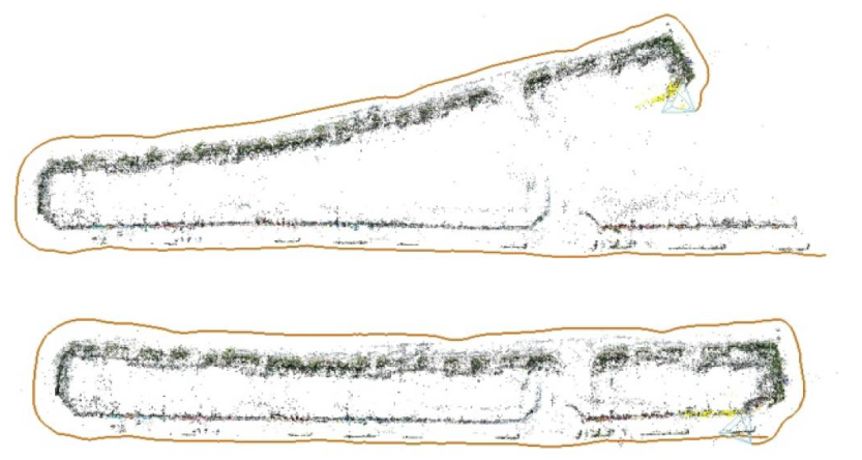
如果有了回環(huán)檢測,機(jī)器人就會(huì)檢測到自己曾經(jīng)到過這個(gè)地方,利用這個(gè)信息和歷史數(shù)據(jù)比對,從而修正累積誤差,得到全局一致的狀態(tài)估計(jì)。
為什么說回環(huán)檢測挺特殊的呢?因?yàn)檫@個(gè)模塊乍一看還挺像機(jī)器學(xué)習(xí)甚至是目前深度神經(jīng)網(wǎng)絡(luò)應(yīng)用的領(lǐng)域。
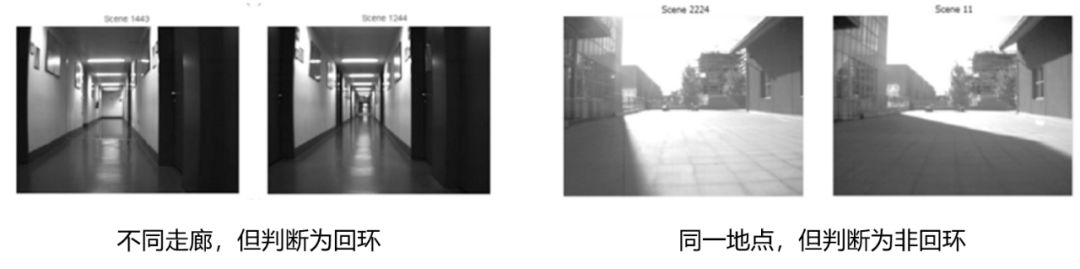
判斷“兩張圖像是否為同一個(gè)地方”會(huì)出現(xiàn)4種結(jié)果:
事實(shí)是,機(jī)器人判斷為是;
事實(shí)是,機(jī)器人判斷為否;
事實(shí)否,機(jī)器人判斷為是;
事實(shí)否,機(jī)器人判斷為否。
最好的結(jié)果當(dāng)然是第1種和第4種,因?yàn)闄C(jī)器人的判斷和事實(shí)符合,可現(xiàn)實(shí)總是不完美的。
而衡量回環(huán)檢測效果的指標(biāo)也有兩種——準(zhǔn)確率(Precision)和召回率(Recall)。
用西瓜書里的話解釋,準(zhǔn)確率關(guān)心的是“挑出的西瓜中有多少比例是好瓜”,召回率關(guān)心的是“所有好瓜中有多少比例被挑了出來”。
西瓜書都搬出來了,這還不是機(jī)器學(xué)習(xí)問題嗎?
當(dāng)然,在SLAM中還是更注重召回率的,希望更多“現(xiàn)實(shí)是回環(huán)”被機(jī)器人“判斷為回環(huán)”。
傳統(tǒng)主流的視覺SLAM中回環(huán)檢測采用的是詞袋模型,當(dāng)然按照目前深度學(xué)習(xí)的勢頭來說,也不妨試試神經(jīng)網(wǎng)絡(luò),但是實(shí)時(shí)性就得另當(dāng)別論了。
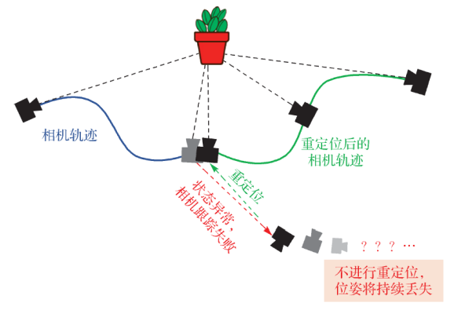
而且,回環(huán)檢測還可以用來進(jìn)行重定位,解決跟蹤失敗的問題,保證在跟蹤失敗的情況下可以快速重新得到當(dāng)前的精確位姿。
最后一個(gè)模塊是地圖構(gòu)建,前面也說過了,我們根據(jù)不同的傳感器類型和應(yīng)用需求可以建立不同的地圖。
還是用高博《視覺SLAM十四講》中的圖,簡潔明了地說明了不同應(yīng)用場景對應(yīng)不同類型的地圖。
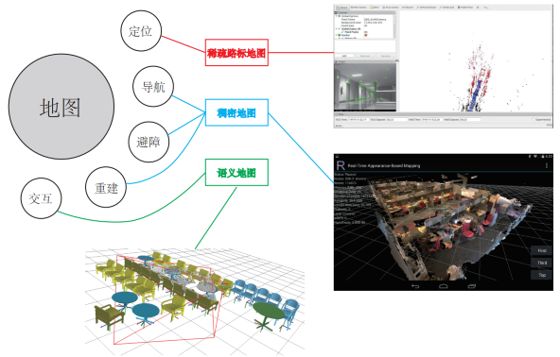
如果只是單純的定位,只需要知道機(jī)器人在什么位置即可,這時(shí)候稀疏路標(biāo)地圖就足夠了。
在導(dǎo)航、避障的情況下,機(jī)器人必須知道什么地方可以走而什么地方不能走,這才能規(guī)劃出運(yùn)動(dòng)路徑。于是就需要稠密地圖,稀疏路標(biāo)點(diǎn)的地圖壓根就不能判斷那是什么東西。
重建也很明了,既然是重建,那就得是帶有輪廓紋理等詳細(xì)信息的稠密地圖了。
如果是人機(jī)交互的話呢,機(jī)器人得知道什么是桌子、杯子在哪里等語義信息,這時(shí)候光是知道物體什么模樣可不行了,得上語義地圖才是。
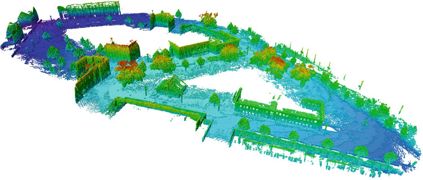
我們在做導(dǎo)航時(shí),有一種常用的地圖,那就是八叉樹地圖(Octomap)。
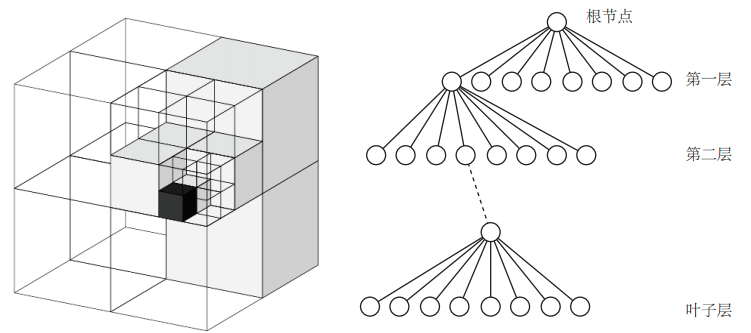
它是把三維空間分為許多方塊,方塊再分為八個(gè)同樣大小的小方塊,小方塊再繼續(xù)往下分。。整個(gè)三維空間就用八叉樹數(shù)據(jù)結(jié)構(gòu)來表示。
當(dāng)方塊中所有子方塊都被占據(jù)或者都沒被占據(jù)的時(shí)候,這個(gè)方塊或者說八叉樹中的這個(gè)節(jié)點(diǎn)就沒必要往下展開了。
相對與點(diǎn)云地圖來說,這樣會(huì)大大減少了地圖的存儲(chǔ)空間!下面就是一張八叉樹地圖。
近兩年,SLAM貌似有要火的趨勢,但是這也不妨礙它毫不平易近人的特質(zhì)。
如果要說這四個(gè)多月以來接觸視覺SLAM什么感受的話,吾之拙見實(shí)難表達(dá)其萬一,所以還是用三張圖結(jié)束此文吧。
入門前:
入門中:
入門后:

當(dāng)然,這是開個(gè)小玩笑。最后,愿大家頭發(fā)濃密,歡迎入坑!
下載1:OpenCV-Contrib擴(kuò)展模塊中文版教程 在「小白學(xué)視覺」公眾號后臺(tái)回復(fù):擴(kuò)展模塊中文教程,即可下載全網(wǎng)第一份OpenCV擴(kuò)展模塊教程中文版,涵蓋擴(kuò)展模塊安裝、SFM算法、立體視覺、目標(biāo)跟蹤、生物視覺、超分辨率處理等二十多章內(nèi)容。 下載2:Python視覺實(shí)戰(zhàn)項(xiàng)目52講 在「小白學(xué)視覺」公眾號后臺(tái)回復(fù):Python視覺實(shí)戰(zhàn)項(xiàng)目,即可下載包括圖像分割、口罩檢測、車道線檢測、車輛計(jì)數(shù)、添加眼線、車牌識別、字符識別、情緒檢測、文本內(nèi)容提取、面部識別等31個(gè)視覺實(shí)戰(zhàn)項(xiàng)目,助力快速學(xué)校計(jì)算機(jī)視覺。 下載3:OpenCV實(shí)戰(zhàn)項(xiàng)目20講 在「小白學(xué)視覺」公眾號后臺(tái)回復(fù):OpenCV實(shí)戰(zhàn)項(xiàng)目20講,即可下載含有20個(gè)基于OpenCV實(shí)現(xiàn)20個(gè)實(shí)戰(zhàn)項(xiàng)目,實(shí)現(xiàn)OpenCV學(xué)習(xí)進(jìn)階。 交流群
歡迎加入公眾號讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測、分割、識別、醫(yī)學(xué)影像、GAN、算法競賽等微信群(以后會(huì)逐漸細(xì)分),請掃描下面微信號加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三?+?上海交大?+?視覺SLAM“。請按照格式備注,否則不予通過。添加成功后會(huì)根據(jù)研究方向邀請進(jìn)入相關(guān)微信群。請勿在群內(nèi)發(fā)送廣告,否則會(huì)請出群,謝謝理解~