
手把手教你使用OpenVINO部署NanoDet模型
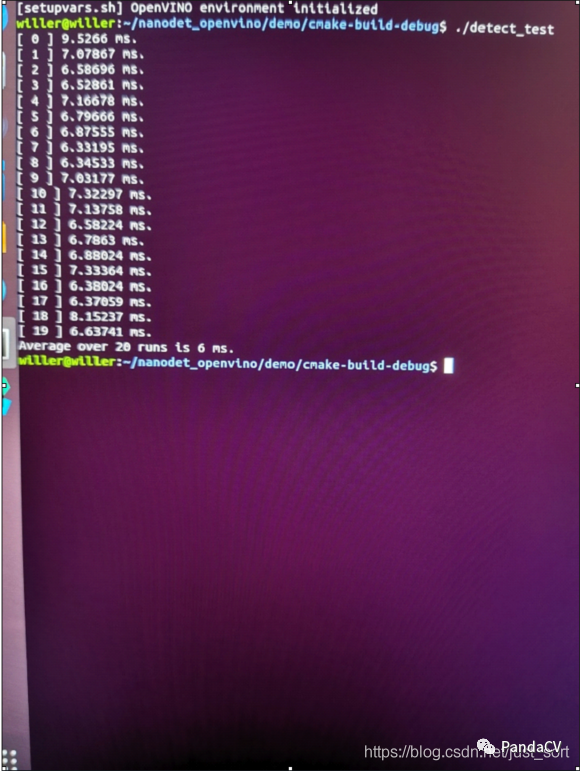
【GiantPandaCV】本文為大家介紹了一個手把手使用OpenVINO部署NanoDet的教程,并開源部署的全部代碼,在Intel i7-7700HQ CPU做到了6ms一幀的速度。
0x0. nanodet簡介
NanoDet (https://github.com/RangiLyu/nanodet)是一個速度超快和輕量級的Anchor-free 目標(biāo)檢測模型。想了解算法本身的可以去搜一搜之前機(jī)器之心的介紹。
0x1. 環(huán)境配置
Ubuntu:18.04
OpenVINO:2020.4
OpenCV:3.4.2
OpenVINO和OpenCV安裝包(編譯好了,也可以自己從官網(wǎng)下載自己編譯)可以從鏈接: https://pan.baidu.com/s/1zxtPKm-Q48Is5mzKbjGHeg 密碼: gw5c下載
OpenVINO安裝
tar?-xvzf?l_openvino_toolkit_p_2020.4.287.tgz
cd?l_openvino_toolkit_p_2020.4.287
sudo?./install_GUI.sh?一路next安裝
cd?/opt/intel/openvino/install_dependencies
sudo?./install_openvino_dependencies.sh
vi?~/.bashrc
把如下兩行放置到bashrc文件尾
source?/opt/intel/openvino/bin/setupvars.sh
source?/opt/intel/openvino/opencv/setupvars.sh
source ~/.bashrc 激活環(huán)境
模型優(yōu)化配置步驟
cd?/opt/intel/openvino/deployment_tools/model_optimizer/install_prerequisites
sudo?./install_prerequisites_onnx.sh(模型是從onnx轉(zhuǎn)為IR文件,只需配置onnx依賴)
OpenCV配置
tar -xvzf opencv-3.4.2.zip 解壓OpenCV到用戶根目錄即可,以便后續(xù)調(diào)用。(這是我編譯好的版本,有需要可以自己編譯)
0x2. NanoDet模型訓(xùn)練和轉(zhuǎn)換ONNX
git clone https://github.com/Wulingtian/nanodet.git
cd nanodet
cd config 配置模型文件,訓(xùn)練模型
定位到nanodet目錄,進(jìn)入tools目錄,打開export.py文件,配置cfg_path model_path out_path三個參數(shù)
定位到nanodet目錄,運(yùn)行 python tools/export.py 得到轉(zhuǎn)換后的onnx模型
python /opt/intel/openvino/deployment_tools/model_optimizer/mo_onnx.py --input_model onnx模型 --output_dir 期望模型輸出的路徑。得到IR文件
0x3. NanoDet模型部署
sudo apt install cmake 安裝cmake
git clone https://github.com/Wulingtian/nanodet_openvino.git (求star!)
cd nanodet_openvino 打開CMakeLists.txt文件,修改OpenCV_INCLUDE_DIRS和OpenCV_LIBS_DIR,之前已經(jīng)把OpenCV解壓到根目錄了,所以按照你自己的路徑指定
定位到nanodet_openvino,cd models 把之前生成的IR模型(包括bin和xml文件)文件放到該目錄下
定位到nanodet_openvino, cd test_imgs 把需要測試的圖片放到該目錄下
定位到nanodet_openvino,編輯main.cpp,xml_path參數(shù)修改為"../models/你的模型名稱.xml"
編輯 num_class 設(shè)置類別數(shù),例如:我訓(xùn)練的模型是安全帽檢測,只有1類,那么設(shè)置為1
編輯 src 設(shè)置測試圖片路徑,src參數(shù)修改為"../test_imgs/你的測試圖片"
定位到nanodet_openvino
mkdir build; cd build; cmake .. ;make
./detect_test 輸出平均推理時間,以及保存預(yù)測圖片到當(dāng)前目錄下,至此,部署完成!
0x4. 核心代碼一覽
//主要對圖片進(jìn)行預(yù)處理,包括resize和歸一化
std::vector<float>?Detector::prepareImage(cv::Mat?&src_img){
????std::vector<float>?result(INPUT_W?*?INPUT_H?*?3);
????float?*data?=?result.data();
????float?ratio?=?float(INPUT_W)?/?float(src_img.cols)?float(INPUT_H)?/?float(src_img.rows)???float(INPUT_W)?/?float(src_img.cols)?:?float(INPUT_H)?/?float(src_img.rows);
????cv::Mat?flt_img?=?cv::Mat::zeros(cv::Size(INPUT_W,?INPUT_H),?CV_8UC3);
????cv::Mat?rsz_img?=?cv::Mat::zeros(cv::Size(src_img.cols*ratio,?src_img.rows*ratio),?CV_8UC3);
????cv::resize(src_img,?rsz_img,?cv::Size(),?ratio,?ratio);
????rsz_img.copyTo(flt_img(cv::Rect(0,?0,?rsz_img.cols,?rsz_img.rows)));
????flt_img.convertTo(flt_img,?CV_32FC3);
????int?channelLength?=?INPUT_W?*?INPUT_H;
????std::vector?split_img?=?{
????????????cv::Mat(INPUT_W,?INPUT_H,?CV_32FC1,?data?+?channelLength?*?2),
????????????cv::Mat(INPUT_W,?INPUT_H,?CV_32FC1,?data?+?channelLength),
????????????cv::Mat(INPUT_W,?INPUT_H,?CV_32FC1,?data)
????};
????cv::split(flt_img,?split_img);
????for?(int?i?=?0;?i?3;?i++)?{
????????split_img[i]?=?(split_img[i]?-?img_mean[i])?/?img_std[i];
????}
????return?result;
}
//加載IR模型,初始化網(wǎng)絡(luò)
bool?Detector::init(string?xml_path,double?cof_threshold,double?nms_area_threshold,int?input_w,?int?input_h,?int?num_class,?int?r_rows,?int?r_cols,?std::vector<int>?s,?std::vector<float>?i_mean,std::vector<float>?i_std){
????_xml_path?=?xml_path;
????_cof_threshold?=?cof_threshold;
????_nms_area_threshold?=?nms_area_threshold;
????INPUT_W?=?input_w;
????INPUT_H?=?input_h;
????NUM_CLASS?=?num_class;
????refer_rows?=?r_rows;
????refer_cols?=?r_cols;
????strides?=?s;
????img_mean?=?i_mean;
????img_std?=?i_std;
????Core?ie;
????auto?cnnNetwork?=?ie.ReadNetwork(_xml_path);?
????InputsDataMap?inputInfo(cnnNetwork.getInputsInfo());
????InputInfo::Ptr&?input?=?inputInfo.begin()->second;
????_input_name?=?inputInfo.begin()->first;
????input->setPrecision(Precision::FP32);
????input->getInputData()->setLayout(Layout::NCHW);
????ICNNNetwork::InputShapes?inputShapes?=?cnnNetwork.getInputShapes();
????SizeVector&?inSizeVector?=?inputShapes.begin()->second;
????cnnNetwork.reshape(inputShapes);
????_outputinfo?=?OutputsDataMap(cnnNetwork.getOutputsInfo());
????for?(auto?&output?:?_outputinfo)?{
????????output.second->setPrecision(Precision::FP32);
????}
????_network?=??ie.LoadNetwork(cnnNetwork,?"CPU");
????return?true;
}
//模型推理及獲取輸出結(jié)果
vector?Detector::process_frame(Mat&?inframe) {
????cv::Mat?showImage?=?inframe.clone();
????std::vector<float>?pr_img?=?prepareImage(inframe);
????InferRequest::Ptr?infer_request?=?_network.CreateInferRequestPtr();
????Blob::Ptr?frameBlob?=?infer_request->GetBlob(_input_name);
????InferenceEngine::LockedMemory<void>?blobMapped?=?InferenceEngine::as(frameBlob)->wmap();
????float*?blob_data?=?blobMapped.as<float*>();
????memcpy(blob_data,?pr_img.data(),?3?*?INPUT_H?*?INPUT_W?*?sizeof(float));
????infer_request->Infer();
????vector?origin_rect;
????vector<float>?origin_rect_cof;
????int?i=0;
????vector?bboxes;
????for?(auto?&output?:?_outputinfo)?{
????????auto?output_name?=?output.first;
????????Blob::Ptr?blob?=?infer_request->GetBlob(output_name);
????????LockedMemory<const?void>?blobMapped?=?as(blob)->rmap();
????????float?*output_blob?=?blobMapped.as<float?*>();
????????bboxes?=?postProcess(showImage,output_blob);
????????++i;
????}
????return?bboxes;
}
//對模型輸出結(jié)果進(jìn)行解碼及nms
std::vector?Detector::postProcess(const?cv::Mat?&src_img,
??????????????????????????????float?*output)? {
????GenerateReferMatrix();
????std::vector?result;
????float?*out?=?output;
????float?ratio?=?std::max(float(src_img.cols)?/?float(INPUT_W),?float(src_img.rows)?/?float(INPUT_H));
????cv::Mat?result_matrix?=?cv::Mat(refer_rows,?NUM_CLASS?+?4,?CV_32FC1,?out);
????for?(int?row_num?=?0;?row_num?????????Detector::Bbox?box;
????????auto?*row?=?result_matrix.ptr<float>(row_num);
????????auto?max_pos?=?std::max_element(row?+?4,?row?+?NUM_CLASS?+?4);
????????box.prob?=?row[max_pos?-?row];
????????if?(box.prob?????????????continue;
????????box.classes?=?max_pos?-?row?-?4;
????????auto?*anchor?=?refer_matrix.ptr<float>(row_num);
????????box.x?=?(anchor[0]?-?row[0]?*?anchor[2]?+?anchor[0]?+?row[2]?*?anchor[2])?/?2?*?ratio;
????????box.y?=?(anchor[1]?-?row[1]?*?anchor[2]?+?anchor[1]?+?row[3]?*?anchor[2])?/?2?*?ratio;
????????box.w?=?(row[2]?+?row[0])?*?anchor[2]?*?ratio;
????????box.h?=?(row[3]?+?row[1])?*?anchor[2]?*?ratio;
????????result.push_back(box);
????}
????NmsDetect(result);
????return?result;
}//主要對圖片進(jìn)行預(yù)處理,包括resize和歸一化
std::vector<float>?Detector::prepareImage(cv::Mat?&src_img){
????std::vector<float>?result(INPUT_W?*?INPUT_H?*?3);
????float?*data?=?result.data();
????float?ratio?=?float(INPUT_W)?/?float(src_img.cols)?float(INPUT_H)?/?float(src_img.rows)???float(INPUT_W)?/?float(src_img.cols)?:?float(INPUT_H)?/?float(src_img.rows);
????cv::Mat?flt_img?=?cv::Mat::zeros(cv::Size(INPUT_W,?INPUT_H),?CV_8UC3);
????cv::Mat?rsz_img?=?cv::Mat::zeros(cv::Size(src_img.cols*ratio,?src_img.rows*ratio),?CV_8UC3);
????cv::resize(src_img,?rsz_img,?cv::Size(),?ratio,?ratio);
????rsz_img.copyTo(flt_img(cv::Rect(0,?0,?rsz_img.cols,?rsz_img.rows)));
????flt_img.convertTo(flt_img,?CV_32FC3);
????int?channelLength?=?INPUT_W?*?INPUT_H;
????std::vector?split_img?=?{
????????????cv::Mat(INPUT_W,?INPUT_H,?CV_32FC1,?data?+?channelLength?*?2),
????????????cv::Mat(INPUT_W,?INPUT_H,?CV_32FC1,?data?+?channelLength),
????????????cv::Mat(INPUT_W,?INPUT_H,?CV_32FC1,?data)
????};
????cv::split(flt_img,?split_img);
????for?(int?i?=?0;?i?3;?i++)?{
????????split_img[i]?=?(split_img[i]?-?img_mean[i])?/?img_std[i];
????}
????return?result;
}
//加載IR模型,初始化網(wǎng)絡(luò)
bool?Detector::init(string?xml_path,double?cof_threshold,double?nms_area_threshold,int?input_w,?int?input_h,?int?num_class,?int?r_rows,?int?r_cols,?std::vector<int>?s,?std::vector<float>?i_mean,std::vector<float>?i_std){
????_xml_path?=?xml_path;
????_cof_threshold?=?cof_threshold;
????_nms_area_threshold?=?nms_area_threshold;
????INPUT_W?=?input_w;
????INPUT_H?=?input_h;
????NUM_CLASS?=?num_class;
????refer_rows?=?r_rows;
????refer_cols?=?r_cols;
????strides?=?s;
????img_mean?=?i_mean;
????img_std?=?i_std;
????Core?ie;
????auto?cnnNetwork?=?ie.ReadNetwork(_xml_path);?
????InputsDataMap?inputInfo(cnnNetwork.getInputsInfo());
????InputInfo::Ptr&?input?=?inputInfo.begin()->second;
????_input_name?=?inputInfo.begin()->first;
????input->setPrecision(Precision::FP32);
????input->getInputData()->setLayout(Layout::NCHW);
????ICNNNetwork::InputShapes?inputShapes?=?cnnNetwork.getInputShapes();
????SizeVector&?inSizeVector?=?inputShapes.begin()->second;
????cnnNetwork.reshape(inputShapes);
????_outputinfo?=?OutputsDataMap(cnnNetwork.getOutputsInfo());
????for?(auto?&output?:?_outputinfo)?{
????????output.second->setPrecision(Precision::FP32);
????}
????_network?=??ie.LoadNetwork(cnnNetwork,?"CPU");
????return?true;
}
//模型推理及獲取輸出結(jié)果
vector?Detector::process_frame(Mat&?inframe) {
????cv::Mat?showImage?=?inframe.clone();
????std::vector<float>?pr_img?=?prepareImage(inframe);
????InferRequest::Ptr?infer_request?=?_network.CreateInferRequestPtr();
????Blob::Ptr?frameBlob?=?infer_request->GetBlob(_input_name);
????InferenceEngine::LockedMemory<void>?blobMapped?=?InferenceEngine::as(frameBlob)->wmap();
????float*?blob_data?=?blobMapped.as<float*>();
????memcpy(blob_data,?pr_img.data(),?3?*?INPUT_H?*?INPUT_W?*?sizeof(float));
????infer_request->Infer();
????vector?origin_rect;
????vector<float>?origin_rect_cof;
????int?i=0;
????vector?bboxes;
????for?(auto?&output?:?_outputinfo)?{
????????auto?output_name?=?output.first;
????????Blob::Ptr?blob?=?infer_request->GetBlob(output_name);
????????LockedMemory<const?void>?blobMapped?=?as(blob)->rmap();
????????float?*output_blob?=?blobMapped.as<float?*>();
????????bboxes?=?postProcess(showImage,output_blob);
????????++i;
????}
????return?bboxes;
}
//對模型輸出結(jié)果進(jìn)行解碼及nms
std::vector?Detector::postProcess(const?cv::Mat?&src_img,
??????????????????????????????float?*output)? {
????GenerateReferMatrix();
????std::vector?result;
????float?*out?=?output;
????float?ratio?=?std::max(float(src_img.cols)?/?float(INPUT_W),?float(src_img.rows)?/?float(INPUT_H));
????cv::Mat?result_matrix?=?cv::Mat(refer_rows,?NUM_CLASS?+?4,?CV_32FC1,?out);
????for?(int?row_num?=?0;?row_num?????????Detector::Bbox?box;
????????auto?*row?=?result_matrix.ptr<float>(row_num);
????????auto?max_pos?=?std::max_element(row?+?4,?row?+?NUM_CLASS?+?4);
????????box.prob?=?row[max_pos?-?row];
????????if?(box.prob?????????????continue;
????????box.classes?=?max_pos?-?row?-?4;
????????auto?*anchor?=?refer_matrix.ptr<float>(row_num);
????????box.x?=?(anchor[0]?-?row[0]?*?anchor[2]?+?anchor[0]?+?row[2]?*?anchor[2])?/?2?*?ratio;
????????box.y?=?(anchor[1]?-?row[1]?*?anchor[2]?+?anchor[1]?+?row[3]?*?anchor[2])?/?2?*?ratio;
????????box.w?=?(row[2]?+?row[0])?*?anchor[2]?*?ratio;
????????box.h?=?(row[3]?+?row[1])?*?anchor[2]?*?ratio;
????????result.push_back(box);
????}
????NmsDetect(result);
????return?result;
}
0x5. 推理時間展示及預(yù)測結(jié)果展示

至此完成了NanoDet在X86 CPU上的部署,希望有幫助到大家。
歡迎關(guān)注GiantPandaCV/PandaCV, 在這里你將看到獨家的深度學(xué)習(xí)分享,堅持原創(chuàng),每天分享我們學(xué)習(xí)到的新鮮知識。( ? ?ω?? )?
有對文章相關(guān)的問題,或者想要加入交流群,歡迎添加BBuf微信:
為了方便讀者獲取資料以及我們公眾號的作者發(fā)布一些Github工程的更新,我們成立了一個QQ群,二維碼如下,感興趣可以加入。