
關(guān)鍵點(diǎn)提取——輕量級(jí)單目3D目標(biāo)檢測(cè)的"點(diǎn)睛之筆"
點(diǎn)擊下方卡片,關(guān)注“新機(jī)器視覺”公眾號(hào)
重磅干貨,第一時(shí)間送達(dá)
單目的3D目標(biāo)檢測(cè)近幾年一直是研究的熱點(diǎn),雖然往算法中添加先驗(yàn)知識(shí),能夠一定程度的提升準(zhǔn)確率,但是也增加了獲取標(biāo)簽的難度和算法設(shè)計(jì)的復(fù)雜性。本文介紹一種端到端且輕量化的單目3D檢測(cè)技術(shù)——基于關(guān)鍵點(diǎn)獲取目標(biāo)在圖像空間的透視投影位置。
聊聊單目的3D目標(biāo)檢測(cè)方法

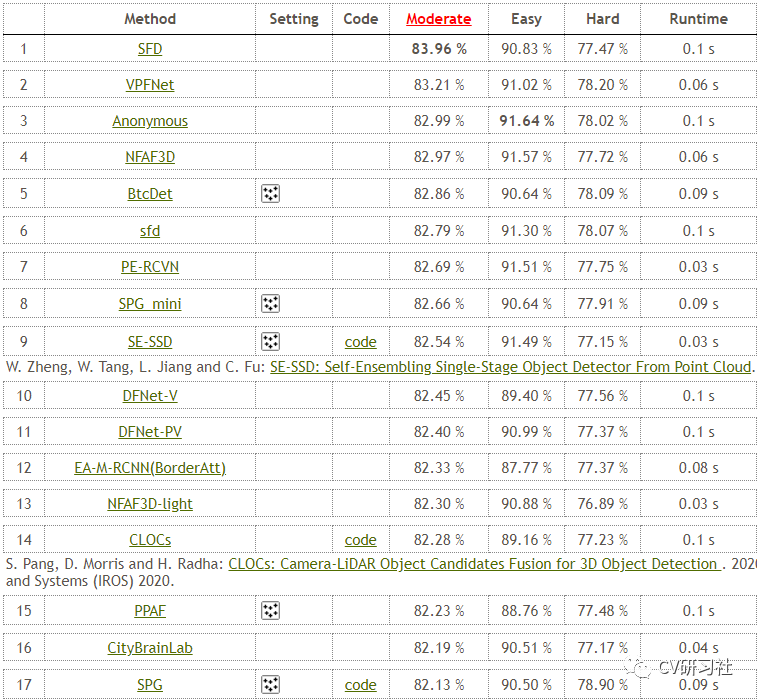





基于關(guān)鍵點(diǎn)的3D目標(biāo)檢測(cè)分析

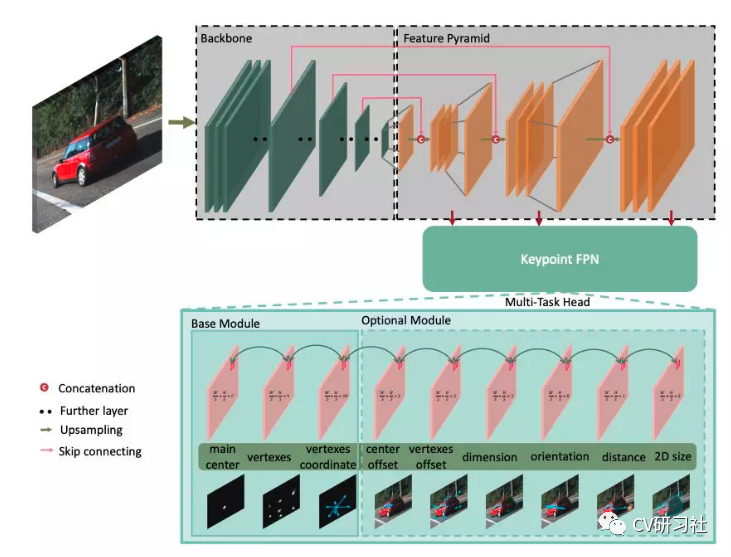
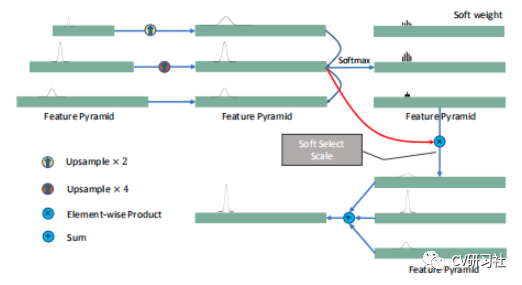

如何檢測(cè)目標(biāo)的關(guān)鍵點(diǎn)?
傳統(tǒng)Harris等算子提取角點(diǎn)
區(qū)域生長等角點(diǎn)檢測(cè)算法
直接在圖像中回歸坐標(biāo)點(diǎn)
高斯分布角點(diǎn)區(qū)域進(jìn)行分割

本文僅做學(xué)術(shù)分享,如有侵權(quán),請(qǐng)聯(lián)系刪文。
評(píng)論
圖片
表情