
計(jì)算機(jī)視覺方向簡介 | 自動(dòng)駕駛中的車道線跟蹤技術(shù)
點(diǎn)擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)
本文轉(zhuǎn)自|人工智能與算法學(xué)習(xí)

本文討論的重點(diǎn)跟蹤算法如何應(yīng)用在車道線應(yīng)用中,即從得到車道線檢測(cè)結(jié)果開始,到連續(xù)穩(wěn)定地車道線跟蹤的過程。包含車道線模型、魯棒的擬合方法和跟蹤。本文原創(chuàng)。
獲得車道線檢測(cè)結(jié)果


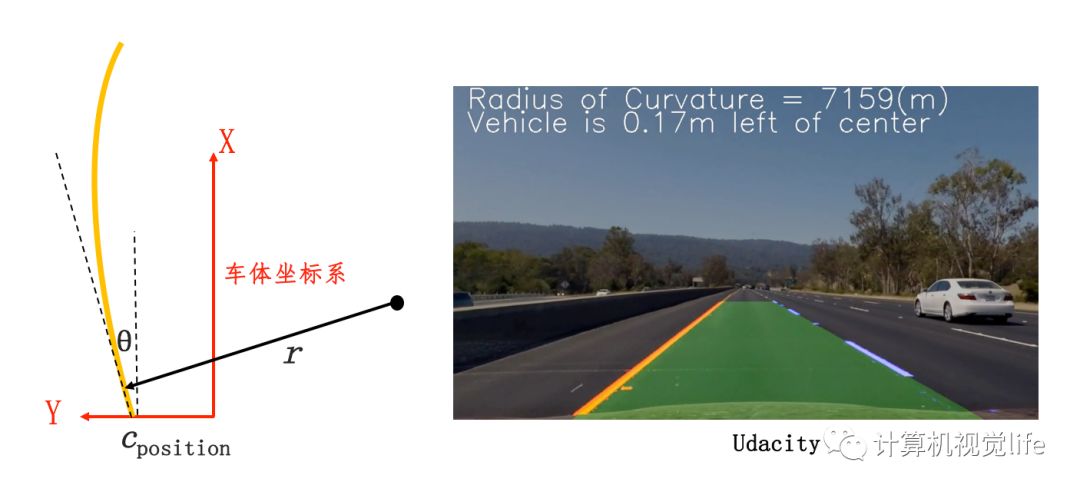
建立車道線模型
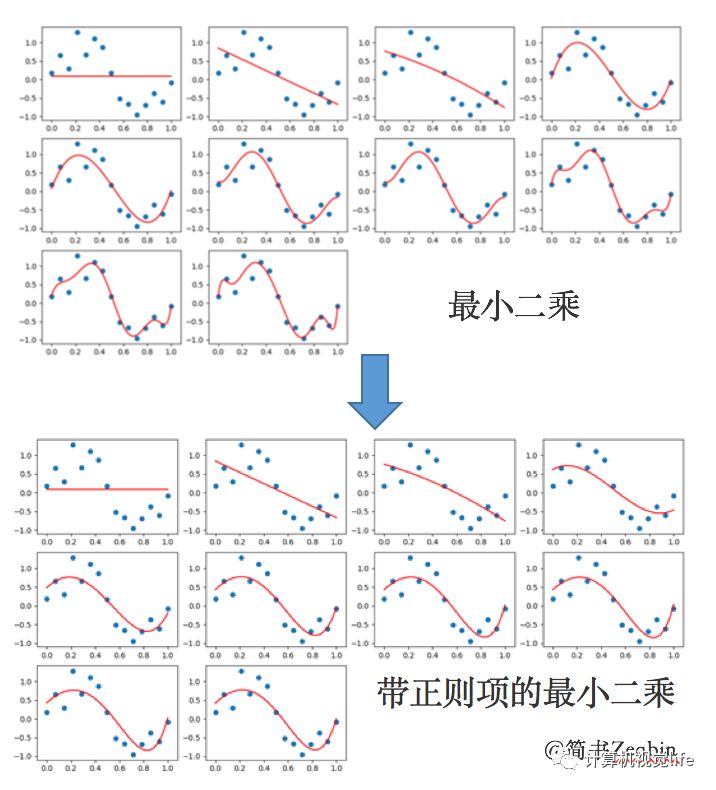
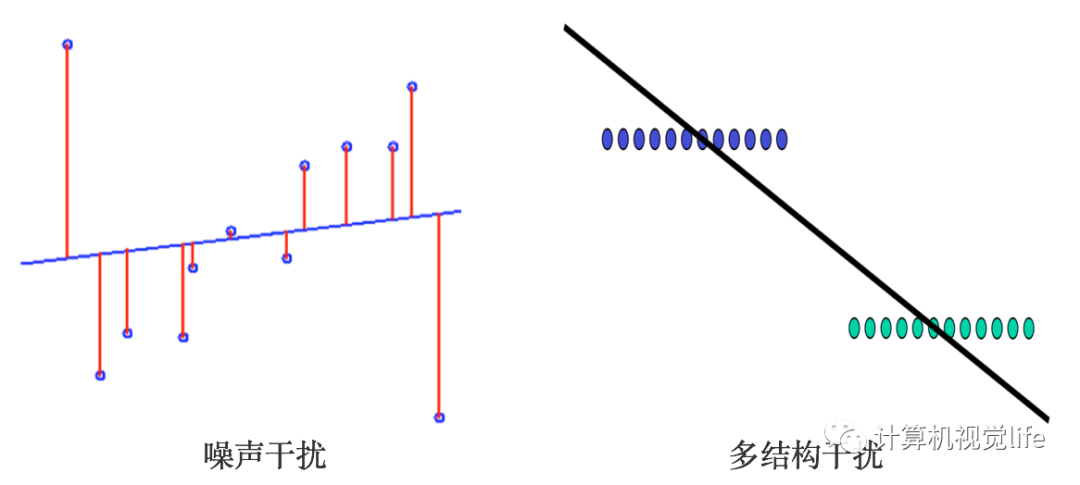
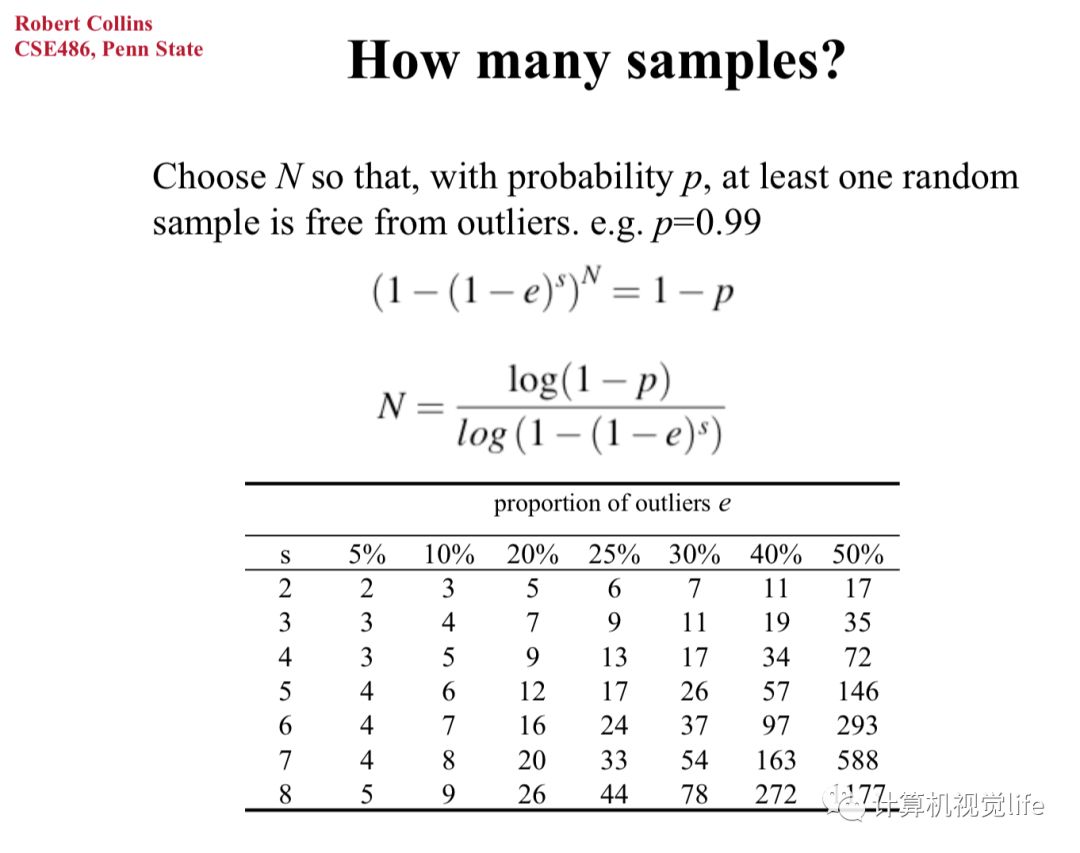
魯棒的曲線擬合
選擇車道線跟蹤方法

比較常用的跟蹤方法之一是Kalman濾波及其變形,這種方法對(duì)于比較理想的車道線(中斷、遮擋或模糊等比較少)有較好的跟蹤效果。Kalman車道線跟蹤的過程如下:
(增加)剛開始增加車道線狀態(tài)量向量作為初始化。之后,只要本時(shí)刻有新檢測(cè)結(jié)果輸入,而上一幀沒有對(duì)應(yīng)的車道線信息,即把新檢測(cè)到的車道線狀態(tài)量為賦給,即增加一條車道線。此處檢測(cè)量由測(cè)量方程決定,由于測(cè)量系統(tǒng)參數(shù)矩陣為單位矩陣,計(jì)檢測(cè)到的就是,因此忽略測(cè)量方程。(預(yù)測(cè))首先需要通過上一時(shí)刻車輛狀態(tài)信息(車速和車輛角速度)和上一時(shí)刻狀態(tài)量預(yù)測(cè)本時(shí)刻狀態(tài)量,即狀態(tài)方程為,其中是和車速有關(guān)的矩陣,是和角速度有關(guān)的矩陣,合起來代表以上一時(shí)刻車輛狀態(tài)為條件,對(duì)本時(shí)刻狀態(tài)量的預(yù)測(cè)。 (更新)如果本時(shí)刻某條預(yù)測(cè)好的車道線和本時(shí)刻檢測(cè)到的車道線滿足某種匹配規(guī)則,即可認(rèn)為是同一條車道線,需要用Kalman增益綜合利用預(yù)測(cè)和檢測(cè)的信息來更新車道線狀態(tài)。具體做法:系統(tǒng)協(xié)方差矩陣更新為,通常測(cè)試場(chǎng)景一定,假設(shè)系統(tǒng)噪聲協(xié)方差矩陣為一個(gè)固定的對(duì)角方陣。隨后計(jì)算 此處測(cè)量協(xié)方差矩陣為對(duì)角方陣,可以根據(jù)當(dāng)前檢測(cè)結(jié)果的置信度而改變。最后得到更新的本時(shí)刻狀態(tài)為 (刪除)如果某條車道線一直是預(yù)測(cè)得出的,并沒有匹配上新檢測(cè)的車道線進(jìn)行更新,則當(dāng)前時(shí)刻如果預(yù)測(cè)次數(shù)大于某一壽命閾值后,就刪除。
資源分享

交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺SLAM“。請(qǐng)按照格式備注,否則不予通過。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~
評(píng)論
圖片
表情