深度估計相關(guān)原理(計算機視覺和深度學習基礎)
今天來和大家介紹一下深度估計涉及到的理論知識點,包括計算機視覺基礎和深度學習基礎。
一、計算機視覺基礎
1.1. 針孔相機模型

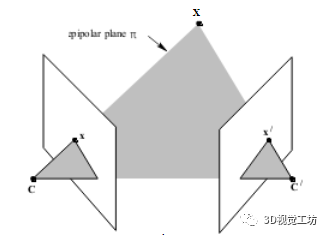
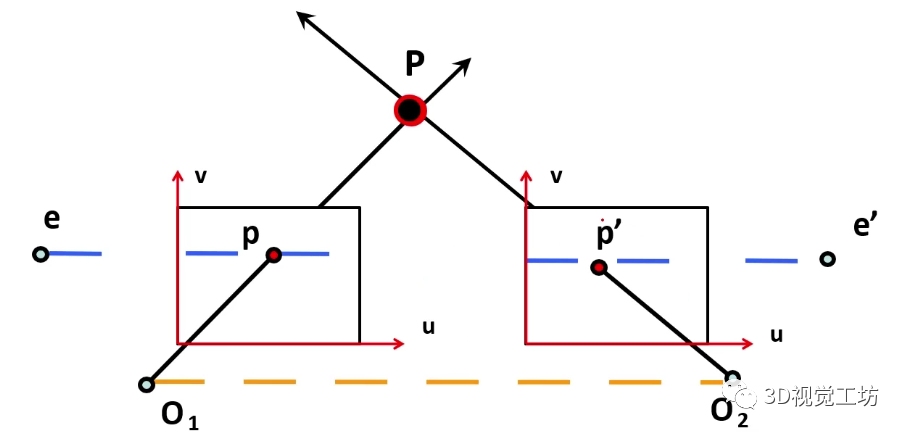
1.2. 對極幾何
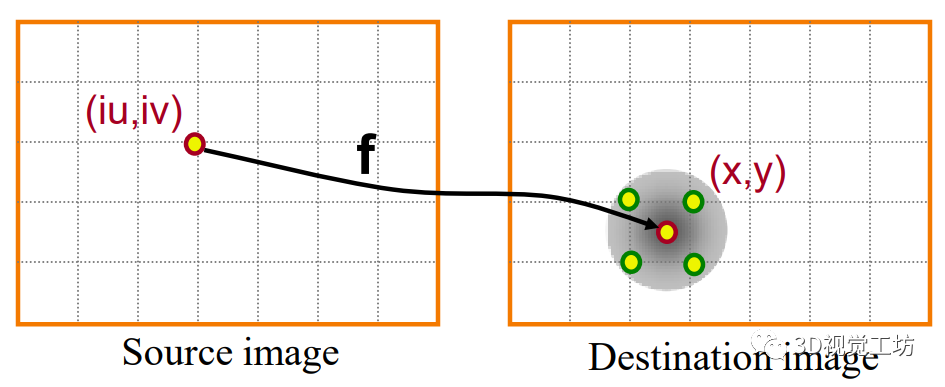
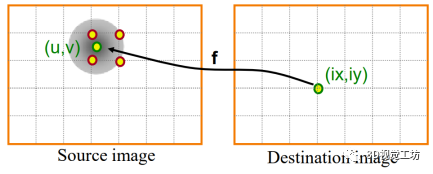
1.3. 圖像重構(gòu)原理

二、深度學習基礎
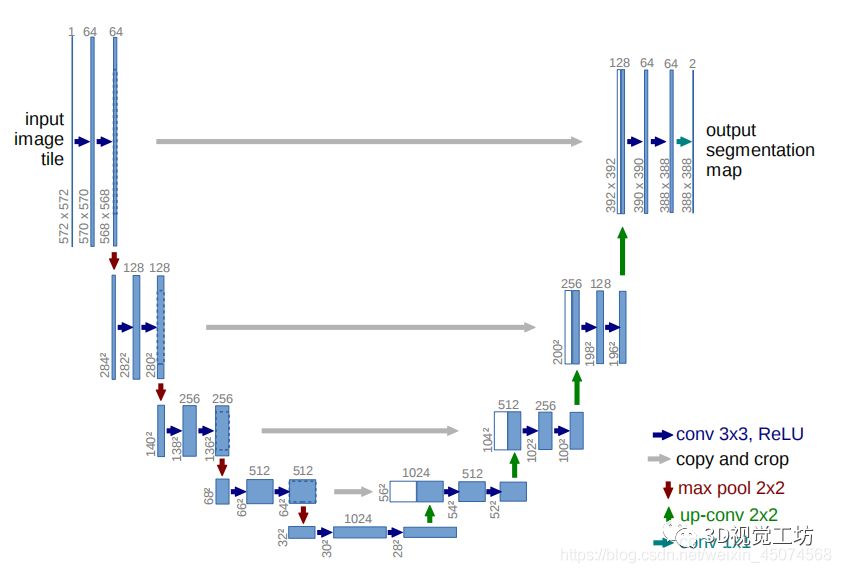
2.1. 相關(guān)網(wǎng)絡模型

2.2. 深度估計中的損失函數(shù)
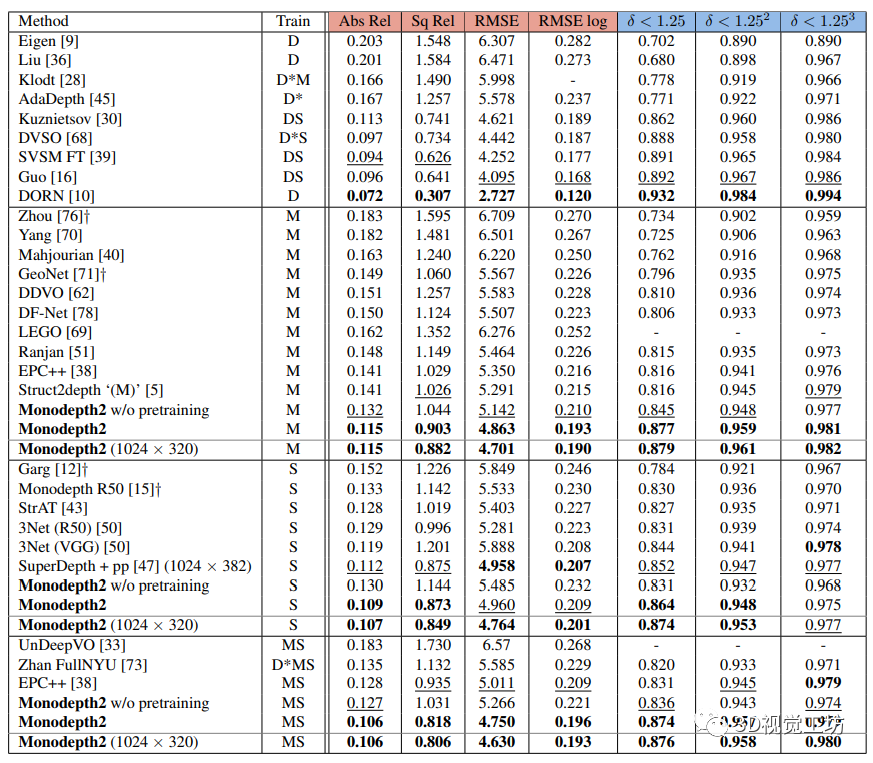
2.3. 深度估計的評價指標
評論
圖片
表情
<b id="afajh"><abbr id="afajh"></abbr></b>
 下載APP
下載APP
<b id="afajh"><abbr id="afajh"></abbr></b>