
3D人體姿態(tài)估計筆記
點擊上方“小白學(xué)視覺”,選擇加"星標"或“置頂”
重磅干貨,第一時間送達

本文轉(zhuǎn)自|3D視覺工坊
姿態(tài)估計
RGB or RGBD 圖像 or 視頻 單目 or 多視角 單人 or 多人 2D or 3D 3D姿態(tài) or 3D形態(tài)

任務(wù)
單人姿態(tài)估計 Benchmark: MPII (2014) 代表作: CPM (CVPR 2016), Hourglass (ECCV 2016) 多人姿態(tài)估計 Benchmark: COCO (2016), CrowdPose (2018) 自底向上: OpenPose (CVPR 2017), Associative Embedding (NIPS 2017) 自頂向下: CPN (CVPR 2018), MSPN (Arxiv 2018), HRNet (CVPR 2019) 人體姿態(tài)跟蹤 Benchmark: PoseTrack (2017) 代表作: Simple Baselines (ECCV 2018)
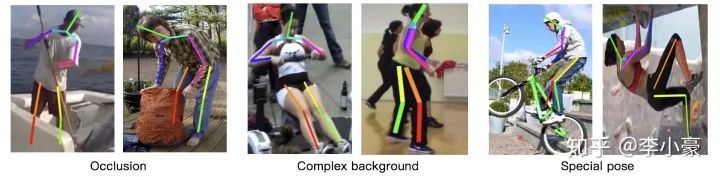
挑戰(zhàn)
遮擋 復(fù)雜背景 特殊姿態(tài)
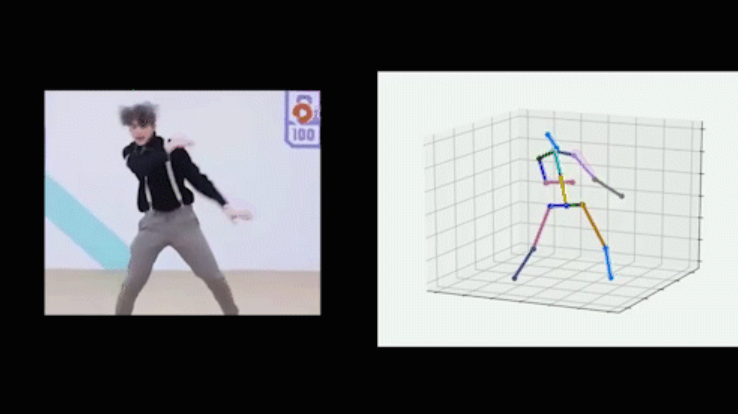
3D姿態(tài)估計
問題
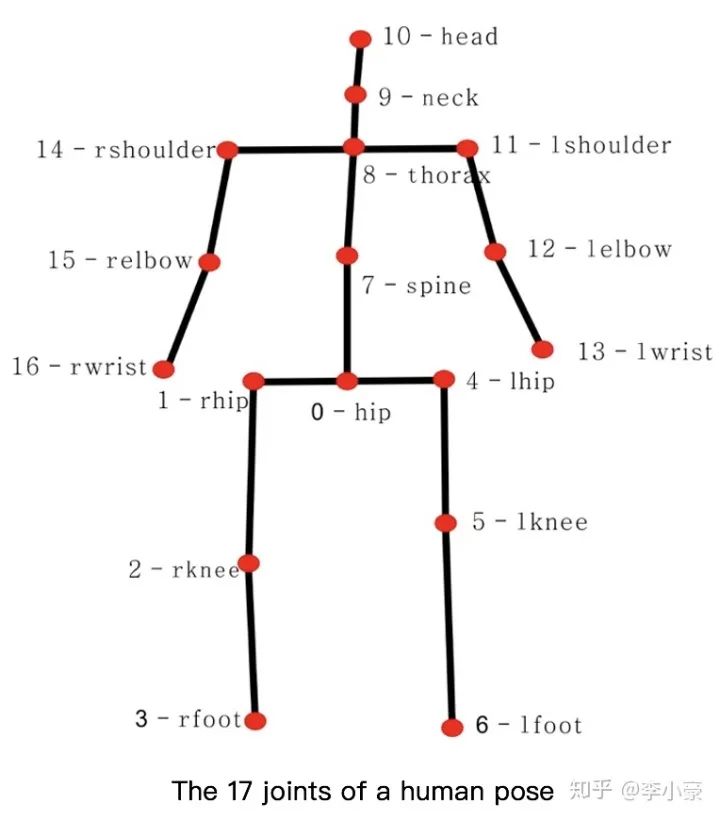
輸入: 包含人體的圖片 輸出: N×3個人體關(guān)節(jié)點
巨大的3D姿態(tài)空間、自遮擋 單視角2D到3D的映射中固有的深度模糊性、不適定性(一個2D骨架可以對應(yīng)多個3D骨架) 缺少大型的室外數(shù)據(jù)集(主要瓶頸) 缺少特殊姿態(tài)的數(shù)據(jù)集(如摔倒,打滾等) 由于數(shù)據(jù)集是在實驗室環(huán)境下建立的,模型的泛化能力較差 3D姿態(tài)數(shù)據(jù)集是依靠適合室內(nèi)環(huán)境的動作捕捉(MOCAP)系統(tǒng)構(gòu)建的。MOCAP系統(tǒng)需要帶有多個傳感器和緊身衣褲的復(fù)雜裝置,在室外環(huán)境使用是不切實際的

應(yīng)用
動畫,游戲 運動捕捉系統(tǒng) 行為理解 姿態(tài)估計可以做為其他算法的輔助環(huán)節(jié)(行人重識別) 人體姿態(tài)估計跟人體相關(guān)的其他任務(wù)一起聯(lián)合學(xué)習(xí)(人體解析)

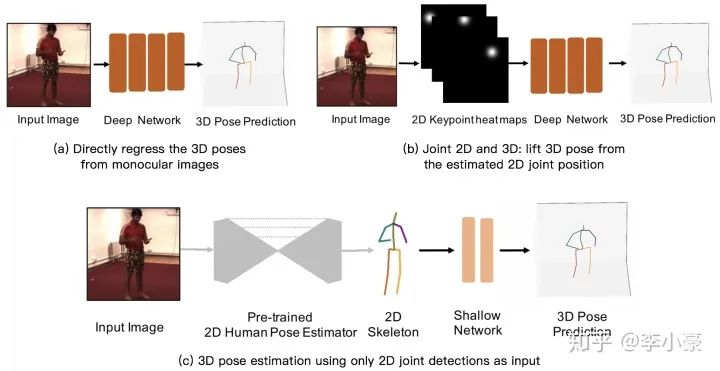
方法
從2D圖片直接暴力回歸得到3D坐標 3D Human Pose Estimation from Monocular Images with Deep Convolutional Neural Network (ACCV 2014) Coarse-to-Fine Volumetric Prediction for Single-Image 3D Human Pose (CVPR 2017) 通過深度學(xué)習(xí)模型建立單目RGB圖像到3D坐標的端到端映射,但是對于單一模型來說需要學(xué)習(xí)的特征太過復(fù)雜。 先獲取2D信息,然后再“提升”到3D姿態(tài) 聯(lián)合2D,3D共同訓(xùn)練(2D信息通常以heatmap來表示) Towards 3D Human Pose Estimation in the Wild (ICCV 2017) 3D Hand Shape and Pose Estimation from a Single RGB Image (CVPR 2019) 需要復(fù)雜的網(wǎng)絡(luò)架構(gòu)和充足的訓(xùn)練樣本。 直接用預(yù)訓(xùn)練好的2D姿態(tài)網(wǎng)絡(luò),將得到的2D坐標輸入到3D姿態(tài)估計網(wǎng)絡(luò)中(得益于2D姿態(tài)估計較為成熟) Simple Yet Effective Baseline (ICCV 2017) 3D human pose estimation in video with temporal convolutions (CVPR 2019) 2D姿態(tài)網(wǎng)絡(luò): Hourglass (ECCV 2016), CPN (CVPR 2018) 優(yōu)點 減少了模型在2D姿態(tài)估計上的學(xué)習(xí)壓力 網(wǎng)絡(luò)結(jié)構(gòu)簡單,輕量級 實時性,快速 訓(xùn)練快,占用顯存少 缺點 缺少原始圖像輸入,可能會丟失一些空間信息 2D姿態(tài)估計的誤差會在3D估計中放大 為什么要先進行2D估計再進行3D估計? 因為基于檢測的模型在2D的關(guān)節(jié)點檢測中表現(xiàn)更好,而在3D空間下,由于非線性程度高,輸出空間大,所以基于回歸的模型比較流行。
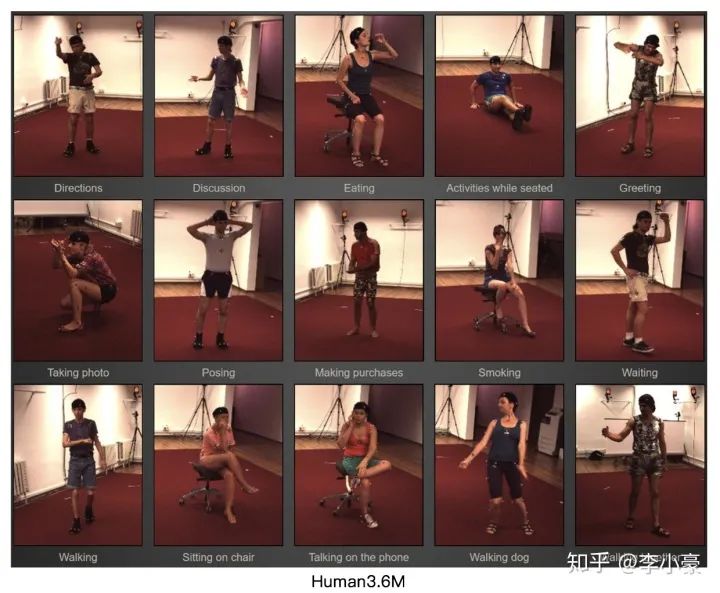
數(shù)據(jù)集
Human3.6M (2014) 3D姿態(tài)估計最大、最廣泛使用的數(shù)據(jù)集 360萬張圖像,4個不同的視角 (原數(shù)據(jù)集提供的是視頻,50fps) 15個動作: directions, discussion, eating, greeting, phoning, posing, purchases, sitting, sitting down, smoking, taking photo, waiting, walking, walking dog, walking together 11 個人,但只有7個人包含3D姿態(tài)標簽 訓(xùn)練: S1, S5, S6, S7, S8 (1559752張圖像) 測試: S9, S11 (550644張圖像) 備注:實際使用的時候只用了7個人的數(shù)據(jù),總共210萬張圖像,所以我感覺應(yīng)該稱為Human2.1M。而且從原數(shù)據(jù)的視頻中提取出圖片的時候,提取出的圖片數(shù)會比標簽要多,提取出來有2137070張圖像,而標簽只有2110396個。在使用這個數(shù)據(jù)集的時候?qū)⒚總€視頻舍棄尾部幾幀多出來的圖像使得與標簽一一對應(yīng)。 HumanEva (2010) MPI-INF-3DHP (2017)
評價指標
Mean Per Joint Position Error (MPJPE): Protocol 1,關(guān)節(jié)點坐標誤差的平均值 網(wǎng)絡(luò)輸出的關(guān)節(jié)點坐標與ground truth的平均歐式距離(通常轉(zhuǎn)換到相機坐標) Procrustes analysis MPJPE (P-MPJPE): Protocol 2,基于Procrustes分析的MPJPE 先對網(wǎng)絡(luò)輸出進行剛性變換(平移,旋轉(zhuǎn)和縮放)向ground truth對齊后,再計算MPJPE Percentage of Correct Key-points (PCK),正確關(guān)鍵點的百分比 如果預(yù)測關(guān)節(jié)與ground truth之間的距離在特定閾值內(nèi),則檢測到的關(guān)節(jié)被認為是正確的 Percentage of Correct Parts (PCP),正確部件的百分比 如果兩個預(yù)測的關(guān)節(jié)位置與ground truth之間的距離小于肢體長度的一半,則認為肢體被檢測到 備注:做3D的問題,需要掌握各個坐標系間的轉(zhuǎn)換,如世界坐標、相機坐標、圖像坐標等。可參考以下兩篇博文 計算機視覺:相機成像原理:世界坐標系、相機坐標系、圖像坐標系、像素坐標系之間的轉(zhuǎn)換 相機成像模型——建立過程(世界坐標系,相機坐標系,圖像坐標系,圖像像素坐標系,四者之間的關(guān)系
監(jiān)督方法
弱監(jiān)督: 不直接用標簽,而用其他信息計算Loss 深度圖、點云、網(wǎng)格、GAN、3D投影到2D 半監(jiān)督 3D投影到2D 自監(jiān)督 全監(jiān)督
視頻序列的優(yōu)點
當前幀有遮擋的時候,可利用相鄰幀的完整性解決這個問題 由于單獨預(yù)測每個幀的3D姿態(tài)時,每個幀中的結(jié)果與其他幀無關(guān),會導(dǎo)致輸出不連貫,帶有視頻抖動 單張圖片包含的深度信息是有限的,網(wǎng)絡(luò)可以從序列中挖掘到更豐富的深度信息 一張2D圖片可以對應(yīng)無窮多個3D姿態(tài),讓模型“多看”同個視角不同時間人的圖片,可以減少深度模糊性,縮小3D姿態(tài)的空間范圍
3D形態(tài)估計
問題
3D形態(tài)的表示
網(wǎng)格: 由三角形組成的多邊形網(wǎng)格 深度圖: 每個像素值代表的是物體到相機xy平面的距離 體素: 三維空間中的一個有大小的點,一個小方塊,相當于是三維空間中的像素 點云: 某個坐標系下的點的數(shù)據(jù)集。點包含了豐富的信息,包括三維坐標xyz、顏色、分類值、強度值、時間等
SMPL(A Skinned Multi-Person Linear Model)
3D Mesh: SMPL 輸入 (82): Shape  + Pose
+ Pose
各個參數(shù)代表人體哪個部分?可參考“SMPL模型Shape和Pose參數(shù)” 輸出: Mesh 
優(yōu)點: 只需要估計少量的參數(shù)便可得到包含6890個頂點的高質(zhì)量的人體3D Mesh 3D Pose 可從3D Mesh中回歸得到,其中  為預(yù)先訓(xùn)練好的線性回歸器
為預(yù)先訓(xùn)練好的線性回歸器

2D Pose 可從3D Pose中使用相機內(nèi)參計算得到

Reference
人體姿態(tài)估計的過去,現(xiàn)在,未來 重新思考人體姿態(tài)估計 人體姿態(tài)估計(Human Pose Estimation)經(jīng)典方法整理 A 2019 guide to Human Pose Estimation with Deep Learning 從DeepNet到HRNet,這有一份深度學(xué)習(xí)“人體姿勢估計”全指南 A 2019 guide to 3D Human Pose Estimation Human Pose Estimation 101 3D人體姿態(tài)估計最新研究2019 3D姿態(tài)估計:語義圖卷積SematicGCN與GAN-RepNet 談?wù)勅S形態(tài)估計 人體3D姿態(tài)重建與估計 基于深度學(xué)習(xí)的視覺三維重建研究總結(jié)
交流群
歡迎加入公眾號讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動駕駛、計算攝影、檢測、分割、識別、醫(yī)學(xué)影像、GAN、算法競賽等微信群(以后會逐漸細分),請掃描下面微信號加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺SLAM“。請按照格式備注,否則不予通過。添加成功后會根據(jù)研究方向邀請進入相關(guān)微信群。請勿在群內(nèi)發(fā)送廣告,否則會請出群,謝謝理解~
評論
圖片
表情