
常見的圖像處理技術(shù)
點(diǎn)擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)
本期文章中,讓我們一起來學(xué)習(xí)以下內(nèi)容。
通過PIL和OpenCV來使用一些常見的圖像處理技術(shù),例如將RGB圖像轉(zhuǎn)換為灰度圖像、旋轉(zhuǎn)圖像、對圖像進(jìn)行消噪、檢測圖像中的邊緣以及裁剪圖像中的感興趣區(qū)域。
使用OpenCV中的模板匹配搜索圖像中的對象。
所需安裝的庫:PIL、OpenCV、imutils
為什么我們需要學(xué)習(xí)圖像處理技術(shù)?
深度學(xué)習(xí)對于圖像的分析、識別以及語義理解具有重要意義。“圖像分類”、“對象檢測”、“實(shí)例分割”等是深度學(xué)習(xí)在圖像中的常見應(yīng)用。為了能夠建立更好的訓(xùn)練數(shù)據(jù)集,我們必須先深入了解基本的圖像處理技術(shù),例如圖像增強(qiáng),包括裁剪圖像、圖像去噪或旋轉(zhuǎn)圖像等。其次基本的圖像處理技術(shù)同樣有助于光學(xué)字符識別(OCR)。
圖像處理技術(shù)通過識別關(guān)鍵特征或讀取圖像中的文本信息,來提高圖像的可解釋性,以便對圖像中存在的對象進(jìn)行分類或檢測。

此處提供代碼和圖像
導(dǎo)入所需的庫
import cv2from PIL import Image
首先我們使用OpenCV和PIL顯示圖像
使用OpenCV讀取和顯示圖像
image = cv2.imread(r'love.jpg')cv2.imshow("Image", image)cv2.waitKey(0)
如果圖像太大,圖像的窗口將不匹配屏幕顯示比例。
那么如何在屏幕上顯示完整的圖像?
默認(rèn)情況下,顯示超大圖像時(shí)圖像都會(huì)被裁剪,不能被完整顯示出來。為了能夠查
看完整圖像,我們將使用OpenCV中的namedWindow(name, flag)來創(chuàng)建一個(gè)新的顯示圖像窗口。
第一個(gè)參數(shù)name是窗口的標(biāo)題,將被用作標(biāo)識符。?當(dāng)您將flag設(shè)置為cv2.WINDOW_NORMAL時(shí),將顯示完整圖像,并可以調(diào)整窗口大小。當(dāng)然flag參數(shù)還有選擇。
image = cv2.imread(r'love.jpg')cv2.namedWindow('Normal Window', cv2.WINDOW_NORMAL)cv2.imshow('Normal Window', image)cv2.waitKey(0)
調(diào)整圖像的尺寸
當(dāng)我們調(diào)整圖像大小時(shí),我們可以更改圖像的高度或?qū)挾龋蛟诒3謱捀弑炔蛔兊那闆r下同時(shí)變化高度和寬度。圖片的寬高比是圖片的寬度與高度的比。
image= cv2.imread(r'taj.jpg')scale_percent =200 # percent of original sizewidth = int(image.shape[1] * scale_percent / 100)height = int(image.shape[0] * scale_percent / 100)dim = (width, height)resized = cv2.resize(image, dim, interpolation = cv2.INTER_AREA)cv2.imshow("Resize", resized)cv2.waitKey(0)
使用PIL讀取和顯示圖像
我們將使用open()加載圖像,然后使用show()進(jìn)行顯示。
使用image.show()創(chuàng)建一個(gè)臨時(shí)文件
pil_image= Image.open(r'love.jpg')pil_image.show("PIL Image")
如果我們對圖像中目標(biāo)的邊緣或其他特征感興趣,要如何對他們進(jìn)行識別呢?
灰度圖像常常用于識別目標(biāo)物體的邊緣,因?yàn)榛叶葓D像不僅助于理解圖像中對比度、陰影漸變,而且有助于理解圖像特征。
與灰度圖像的2D通道相比,RGB圖像具有三個(gè)通道:紅色,綠色和藍(lán)色。與彩色圖像相比,灰度圖像每個(gè)像素的信息更少,因此灰度圖像的處理時(shí)間將更快。
使用OpenCV對彩色圖像進(jìn)行灰度縮放
以下是使用cvtColor()將彩色圖像轉(zhuǎn)換為灰度圖像的方法及轉(zhuǎn)換結(jié)果。
image = cv2.imread(r'love.jpg')gray_image= cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)cv2.namedWindow('Gray Image', cv2.WINDOW_NORMAL)cv2.imshow('Gray Image', gray_image)cv2.waitKey(0)
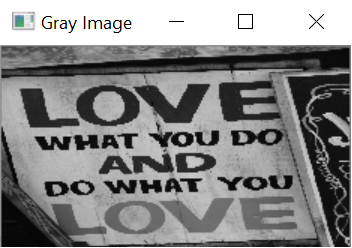
完成轉(zhuǎn)換的灰度圖
使用PIL對彩色圖像進(jìn)行灰度縮放
convert()提供了此圖像轉(zhuǎn)換的另一種方式,?“ L”模式用于轉(zhuǎn)換為灰度圖像,“ RGB”模式用于轉(zhuǎn)換為彩色圖像。
pil_image= Image.open(r'love.jpg')gray_pil=pil_image.convert('L')gray_pil.show()
使用OpenCV進(jìn)行邊緣檢測
我們將使用Canny算子對圖像中的邊緣進(jìn)行檢測。Canny邊緣檢測是通過灰度圖像,使用高階算法完成的。
Canny():第一個(gè)參數(shù)是輸入圖像,第二個(gè)和第三個(gè)參數(shù)是閾值1和閾值2的值。
強(qiáng)度梯度大于threshold2的邊緣被視為邊緣,低于threshold1的邊緣被視為非邊緣。非邊緣將被刪除。兩個(gè)閾值之間的任何梯度強(qiáng)度值都根據(jù)它們的連通性被分類為邊緣或非邊緣。
image= cv2.imread(r'taj.jpg')cv2.namedWindow("Edge", cv2.WINDOW_NORMAL)denoised_image = cv2.Canny(image, 100,200 )cv2.imshow("Edge", denoised_image)cv2.waitKey(0)
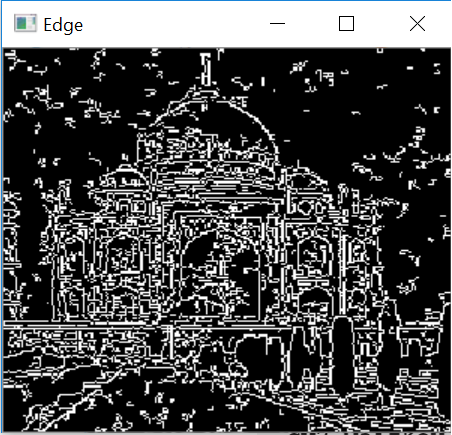
Canny邊緣處理
如果圖像發(fā)生一定的傾斜或旋轉(zhuǎn),應(yīng)該怎樣進(jìn)行調(diào)整?
OCR對傾斜文本的提取效果不佳,因此我們需要對原圖像進(jìn)行校正。可以使用OpenCV和PIL中的rotate()對圖像進(jìn)行角度校正。
使用OpenCV旋轉(zhuǎn)圖像
cv2.ROTATE_90_CLOCKWISE
cv2. ROTATE_90_COUNTERCLOCKWISE
cv2.ROTATE_180
image = cv2.imread(r'love.jpg')cv2.namedWindow("Rotated Image", cv2.WINDOW_NORMAL)rotated_img= cv2.rotate(image,cv2.ROTATE_90_CLOCKWISE )cv2.imshow("Rotated Image", rotated_img)cv2.waitKey(0)
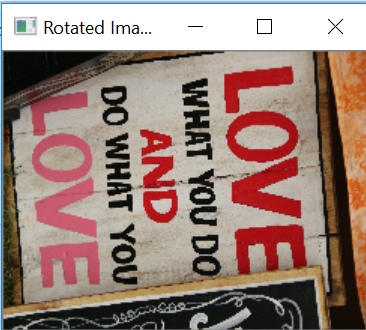
使用OpenCV將圖像順時(shí)針旋轉(zhuǎn)90度
如果我們想將圖像旋轉(zhuǎn)特定角度怎么辦?
根據(jù)特定角度旋轉(zhuǎn)圖像
在下面的代碼中,圖像以60度為增量旋轉(zhuǎn)
使用?imutils中的rotate()
import imutilsimport numpy as npimage = cv2.imread(r'love.jpg')# loop over the rotation anglesfor angle in np.arange(0, 360, 60):cv2.namedWindow("Rotated", cv2.WINDOW_NORMAL)rotated = imutils.rotate(image, angle)cv2.imshow("Rotated", rotated)cv2.waitKey(0)
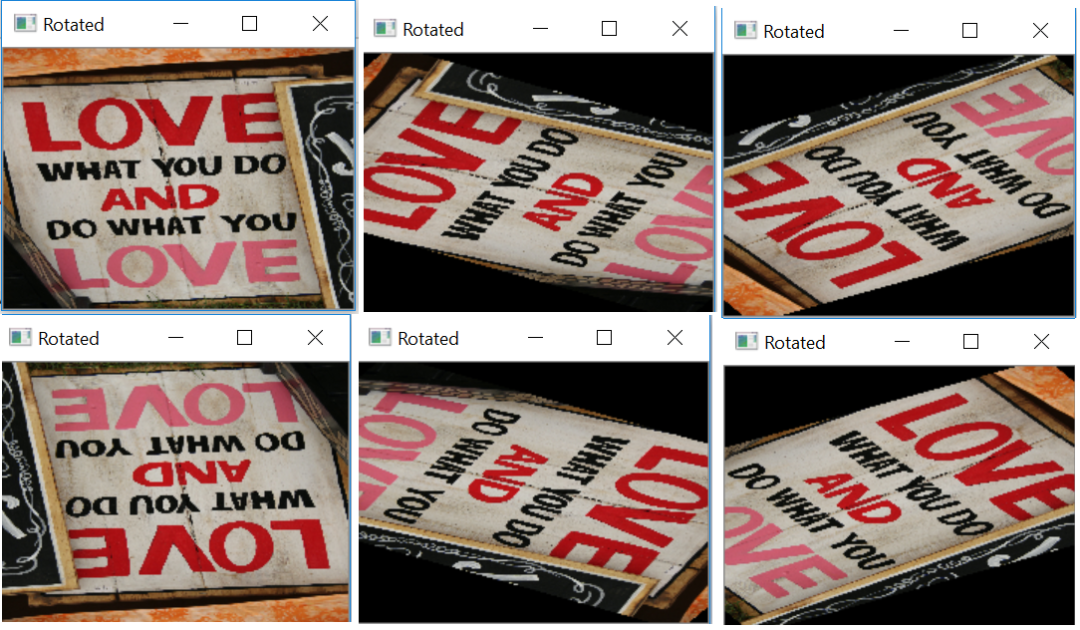
使用imutils以60度為增量旋轉(zhuǎn)圖像
使用PIL旋轉(zhuǎn)圖像
此處使用PIL將圖像旋轉(zhuǎn)110度
pil_image= Image.open(r'love.jpg')rotate_img_pil=pil_image.rotate(110)rotate_img_pil.show()
使用PIL將圖像旋轉(zhuǎn)110度
當(dāng)圖像因噪聲而變差并影響圖像分析時(shí),我們應(yīng)該如何提高圖像質(zhì)量?
使用OpenCV對圖像進(jìn)行除噪
噪聲并不是我們想得到的信號,就圖像而言,它會(huì)使圖像受到干擾而失真。
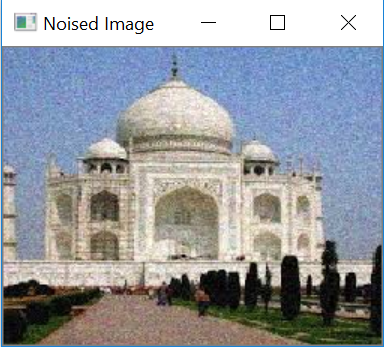
使用OpenCV最小化圖像中出現(xiàn)的噪聲,首先輸入含有噪聲的圖像
image= cv2.imread(r'taj.jpg')cv2.namedWindow("Noised Image", cv2.WINDOW_NORMAL)cv2.imshow("Noised Image", image)cv2.waitKey(0)
src:?源圖像
dst:?輸出與src具有相同大小和類型的圖像
h:?調(diào)節(jié)過濾器強(qiáng)度。?較高的h值可以完全消除噪點(diǎn)和圖像細(xì)節(jié),較小的h值可以保留圖像細(xì)節(jié)以及一些噪點(diǎn)。
hForColorComponents:?與h相同,但僅用于彩色圖像,通常與h相同
templateWindowSize:?默認(rèn)0(推薦7)
searchWindowSize:?默認(rèn)0(推薦21)
image= cv2.imread(r'taj.jpg')cv2.namedWindow("Denoised Image", cv2.WINDOW_NORMAL)denoised_image = cv2.fastNlMeansDenoisingColored(image,None, h=5)cv2.imshow("Denoised Image", denoised_image)cv2.waitKey(0)
image[y_start:y_end, x_start:x_end]
image= cv2.imread(r'taj.jpg')resized_img= image[15:170, 20:200]cv2.imshow("Resize", resized_img)cv2.waitKey(0)
使用PIL裁剪圖像
pil_image = Image.open(r'taj.jpg')# Get the Size of the image in pixelswidth, height = pil_image.size# Setting the cropped image co-ordinatesleft = 3top = height /25right = 200bottom = 3 * height / 4# Crop the image based on the above dimensioncropped_image = pil_image.crop((left, top, right, bottom))# Shows the image in image viewercropped_image.show()
cv2.TM_SQDIFF
cv2.TM_SQDI
cv2.TM_C
cv2.TM_CCORR_NORMED
cv2.TM_CCOEFF
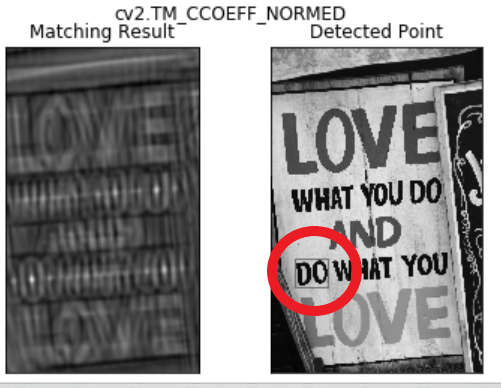
cv2.TM_CCOEFF_NORMED
import cv2import numpy as npfrom matplotlib import pyplot as pltimg = cv2.imread(r'love.jpg',0)cv2.imshow("main",img)cv2.waitKey(0)template = cv2.imread(r'template1.png',0)cv2.imshow("Template",template)cv2.waitKey(0)w, h = template.shape[::-1]methods = [ 'cv2.TM_CCOEFF_NORMED']for meth in methods:method = eval(meth)# Apply template Matchingres = cv2.matchTemplate(img,template,method)min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)threshold=0.95loc=np.where(res>threshold)if len(loc[0])>0:# If the method is TM_SQDIFF or TM_SQDIFF_NORMED, take minimumif method in [ cv2.TM_SQDIFF_NORMED]:top_left = min_locbottom_right = (top_left[0] + w, top_left[1] + h)cv2.rectangle(img,top_left, bottom_right,100,20)plt.subplot(121),plt.imshow(res,cmap = 'gray')plt.title('Matching Result'), plt.xticks([]), plt.yticks([])plt.subplot(122),plt.imshow(img,cmap = 'gray')plt.title('Detected Point'), plt.xticks([]), plt.yticks([])plt.suptitle(meth)plt.show()else:print("Template not matched")
交流群
歡迎加入公眾號讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測、分割、識別、醫(yī)學(xué)影像、GAN、算法競賽等微信群(以后會(huì)逐漸細(xì)分),請掃描下面微信號加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三?+?上海交大?+?視覺SLAM“。請按照格式備注,否則不予通過。添加成功后會(huì)根據(jù)研究方向邀請進(jìn)入相關(guān)微信群。請勿在群內(nèi)發(fā)送廣告,否則會(huì)請出群,謝謝理解~