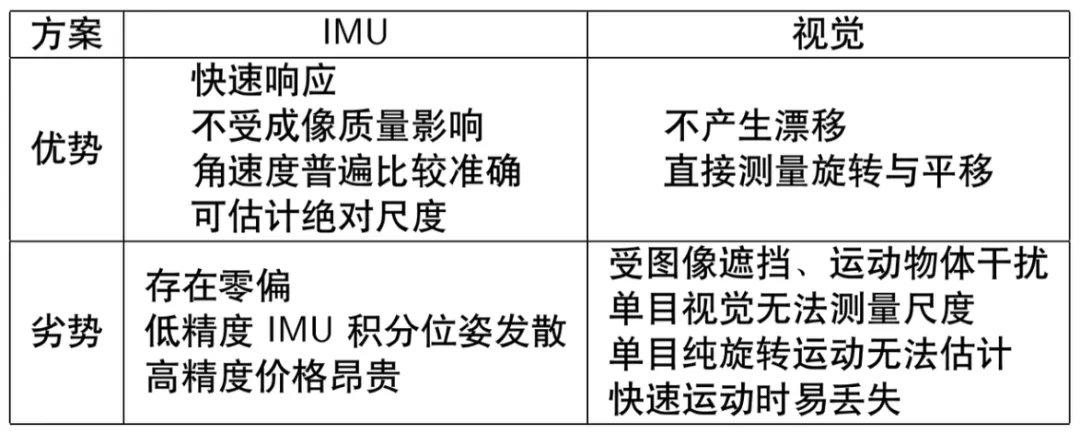
作為移動(dòng)機(jī)器人的“眼睛”,視覺(jué)SLAM雖然實(shí)現(xiàn)了移動(dòng)機(jī)器人的自主定位和導(dǎo)航,但單目視覺(jué) SLAM 算法存在一些本身框架無(wú)法克服的缺陷,例如尺度問(wèn)題、累計(jì)誤差等問(wèn)題。而融合 IMU 和視覺(jué)信息的 VIO 算法能夠彌補(bǔ)視覺(jué)SLAM的缺陷,很大程度地提高單目 SLAM 算法性能,是一種低成本高性能的導(dǎo)航方案。在機(jī)器人、AR/VR等領(lǐng)域得到了應(yīng)用。
很多伙伴在應(yīng)用SLAM時(shí)發(fā)現(xiàn)單一傳感器的不足,從而選擇使用與IMU融合的方案。隨著后期的不斷學(xué)習(xí),發(fā)現(xiàn)雖然接觸過(guò)定位和建圖方面的知識(shí),但沒(méi)有系統(tǒng)學(xué)習(xí)過(guò)相關(guān)的內(nèi)容,阻礙了前進(jìn)的步伐。而VIO是一個(gè)龐大的任務(wù)系統(tǒng),涵蓋了SLAM的各個(gè)部分,需要系統(tǒng)地學(xué)習(xí)了解各部分之間的關(guān)系。雖然現(xiàn)在公開(kāi)的資料多,但由于沒(méi)有系統(tǒng)的教程,學(xué)習(xí)難度大、效率低,想要真正學(xué)懂學(xué)透要耗費(fèi)很長(zhǎng)時(shí)間。基于此,深藍(lán)學(xué)院推出了『視覺(jué)SLAM進(jìn)階:從零開(kāi)始手寫VIO』線上課程。課程重點(diǎn)講解了預(yù)積分、滑動(dòng)窗口濾波算法、邊緣化、優(yōu)化等重要原理和過(guò)程,抓住VIO的主線詳細(xì)介紹了系統(tǒng)各個(gè)模塊的內(nèi)容,幫助伙伴們高效學(xué)習(xí),透徹理解原理并實(shí)現(xiàn)應(yīng)用落地。 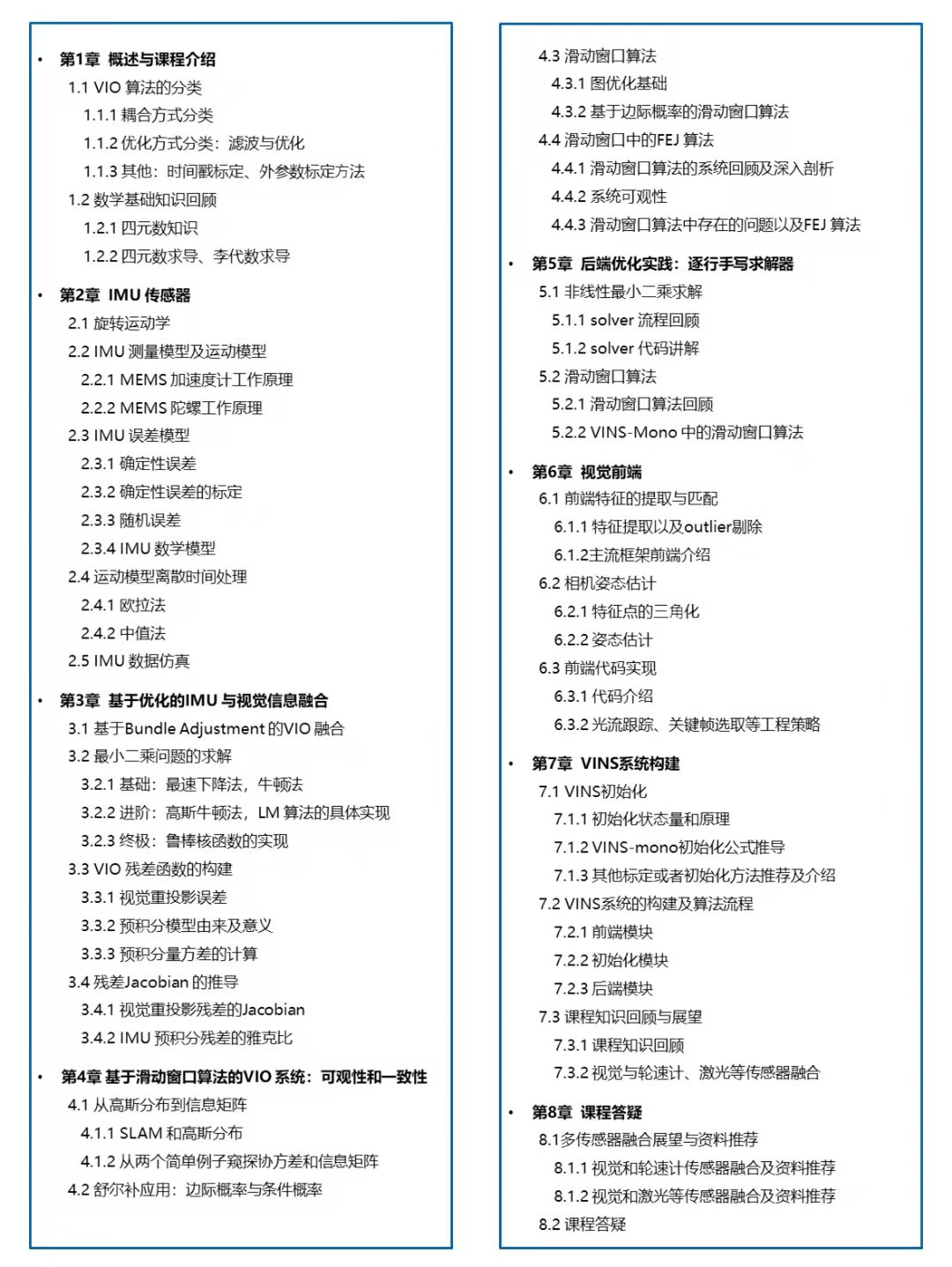 (點(diǎn)擊查看大圖)
(點(diǎn)擊查看大圖)本門課程采用理論與實(shí)踐相結(jié)合的教學(xué)方式,每章節(jié)后都有實(shí)踐項(xiàng)目,讓大家將課上所學(xué)知識(shí),即學(xué)即用,通過(guò)親自動(dòng)手實(shí)踐達(dá)到靈活掌握,融會(huì)貫通的效果。
1. 學(xué)習(xí)過(guò)程中一步一步推導(dǎo)公式,打下扎實(shí)的數(shù)學(xué)基礎(chǔ);
2. 通過(guò)學(xué)習(xí)視覺(jué)和IMU的信息融合,掌握基于圖優(yōu)化的多傳感器信息融合框架;
3. 通過(guò)手寫后端優(yōu)化器,理清SLAM后端的每個(gè)細(xì)節(jié),加深對(duì)優(yōu)化的理解,為以后工作中移植、加速或改進(jìn)自有的SLAM系統(tǒng)提供技術(shù)支持。1. 優(yōu)質(zhì)的學(xué)習(xí)圈子
伙伴們大多是來(lái)自985、211及海外院校碩博,在這里大家一起學(xué)習(xí)、進(jìn)行討論與研究。獨(dú)一無(wú)二的優(yōu)質(zhì)圈子將是你未來(lái)學(xué)習(xí)與就業(yè)的寶貴資源。
學(xué)完課程后將有機(jī)會(huì)收獲優(yōu)秀學(xué)員證書(shū)、畢業(yè)證書(shū),為你的簡(jiǎn)歷加分添彩。1. 三師助力
講師&助教及時(shí)答疑解惑,班主任全程帶班督學(xué),幫你克服拖延,不斷進(jìn)步。助教1V1批改作業(yè),并在班會(huì)中進(jìn)行講評(píng)和指導(dǎo);在班會(huì)中,學(xué)習(xí)更多技巧;在交流中收獲更多思路。