
最全自動(dòng)駕駛技術(shù)架構(gòu)和綜述
環(huán)境感知定位:主要是通過傳感器技術(shù)和攝像頭、GPS等技術(shù)獲取汽車行駛過程中的環(huán)境指標(biāo),并且將數(shù)據(jù)采集
決策規(guī)劃:通過收集的數(shù)據(jù),對(duì)車輛的下一步行為作出判斷和指導(dǎo)
執(zhí)行決策:目前大部分車輛都采用線控設(shè)計(jì),如何將決策通過信號(hào)指令控制汽車的油門、制動(dòng)等相關(guān)系統(tǒng)
以上3個(gè)流程,每一個(gè)步驟都包含了許多核心技術(shù)和功能點(diǎn),在接下來的系列文章中我將一一講解,本篇文章作為綜述,核心體現(xiàn)的是下面這種自動(dòng)駕駛技術(shù)架構(gòu)圖,這張架構(gòu)圖包含了每個(gè)流程的核心功能。
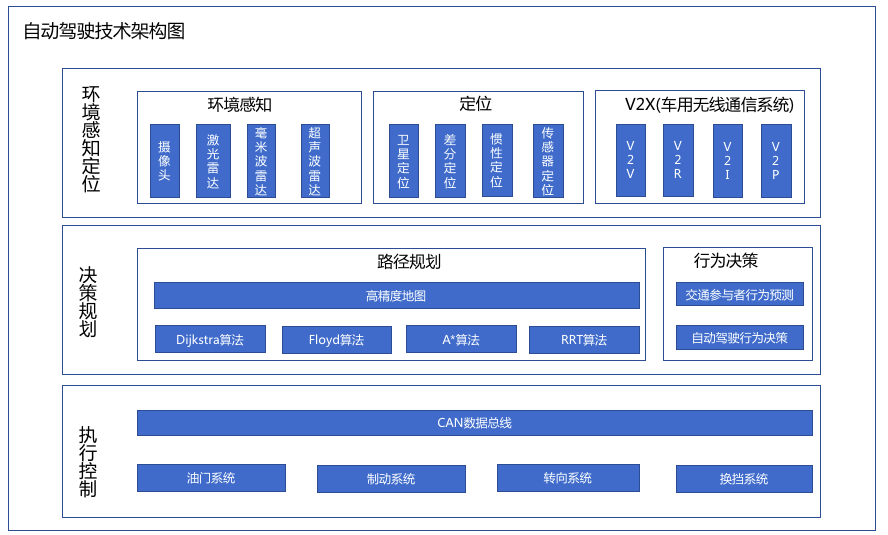
環(huán)境感知和定位其實(shí)是由3個(gè)模塊組成,分別是環(huán)境感知、定位、V2X組成。
1.1攝像頭
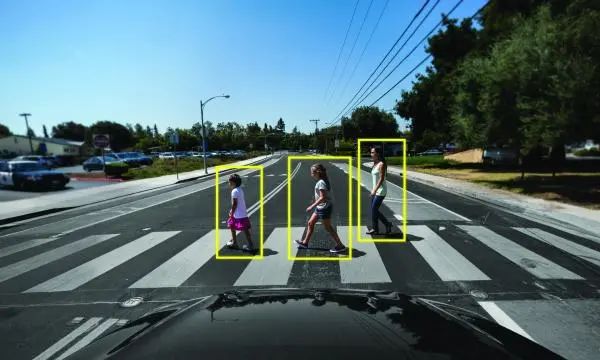
攝像頭是最接近于人眼的一種環(huán)境感知設(shè)備。常見的車載攝像頭包含單目攝像頭、雙目攝像頭、環(huán)視攝像頭。單目攝像頭一般一般至于車的頂端,負(fù)責(zé)監(jiān)控前方的路障,但是對(duì)距離感知不太敏感。
而雙目攝像頭,可以利用視距差,通過三角測(cè)距技術(shù)獲取障礙物到車輛的距離。比如下圖P1和P2為兩個(gè)攝像頭,P為障礙物。可以通過三角測(cè)距獲取P到車輛的距離。

而環(huán)視攝像頭至少需要4個(gè),可以360度的監(jiān)控全車周邊的情況。

采用攝像頭識(shí)別的問題在于需要依賴大量的圖像數(shù)據(jù)積累,并且訓(xùn)練生成視覺模型才能識(shí)別,整個(gè)的技術(shù)成長周期比較長。除了攝像頭,還可以通過雷達(dá)實(shí)現(xiàn)環(huán)境感知。雷達(dá)分為激光雷達(dá)、毫米波雷達(dá)和超聲波雷達(dá)。
1.2 激光雷達(dá)
其中激光雷達(dá)又稱LiDAR,他的核心原理是通過發(fā)送一道光,這個(gè)光遇到障礙物會(huì)反彈回收,通過兩者的時(shí)間差來判斷距離。
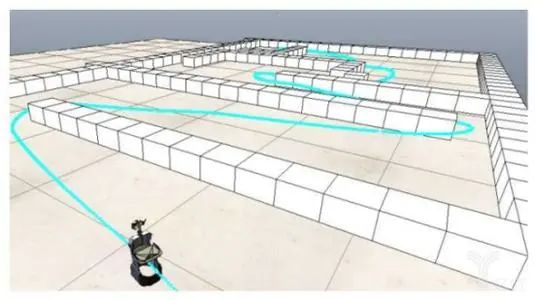
另外,通過激光雷達(dá)的數(shù)據(jù)采集,可以繪制出點(diǎn)云圖,從而實(shí)現(xiàn)對(duì)障礙物的形狀、大小、距離的描繪,典型的點(diǎn)云圖如下:
激光雷達(dá)的一個(gè)主要問題就是容易受到天氣的影響,比如降雨天氣下,水珠就容易對(duì)激光雷達(dá)的效果產(chǎn)生影響。
1.3毫米波雷達(dá)
毫米波雷達(dá)也能起到車輛和物體的測(cè)距效果,通過發(fā)射信號(hào)和接收信號(hào)之間頻率的轉(zhuǎn)變實(shí)現(xiàn)速度的推送。毫米波雷達(dá)相較于激光雷達(dá)相比,穿透灰塵和煙的能力較強(qiáng),在非常極端的天氣條件下也可以正常工作。
1.4超聲波雷達(dá)
超聲波雷達(dá)是輔助駕駛領(lǐng)域應(yīng)用比較多的一種雷達(dá),常常安裝到車后方的保險(xiǎn)杠,用于倒車輔助功能。

原理是發(fā)出和接收相同頻率的聲波,然后通過時(shí)間差測(cè)量距離。超聲波雷達(dá)不太適合遠(yuǎn)距離測(cè)距。
目前自動(dòng)駕駛領(lǐng)域通常是攝像頭和激光雷達(dá)、毫米波雷達(dá)配合使用。單一模式的環(huán)境識(shí)別都會(huì)存在一定的劣勢(shì)。
環(huán)境感知技術(shù)主要是幫助車輛獲取道路狀況信息,定位服務(wù)可以幫助車輛獲取到車輛所在的具體坐標(biāo),為車輛的決策規(guī)劃提供依據(jù)。常見的定位系統(tǒng)有衛(wèi)星定位、差分定位和慣性導(dǎo)航定位等。
2.1 衛(wèi)星定位
衛(wèi)星定位是日常大家非常熟悉的定位方式,常見的衛(wèi)星定位服務(wù)有美國的GPS、歐洲的伽利略、中國的北斗導(dǎo)航等。這里多說一句,因?yàn)樽詣?dòng)駕駛系統(tǒng)一旦商用,所有車輛運(yùn)行軌跡將被定位系統(tǒng)監(jiān)控,所以出于國家安全考慮,各國大概率將采用本國的衛(wèi)星定位系統(tǒng)。
衛(wèi)星定位的基本原理就是通過三角定位的方案,至少3顆衛(wèi)星同時(shí)跟地面車輛連接,就可以計(jì)算出準(zhǔn)確的車輛坐標(biāo)。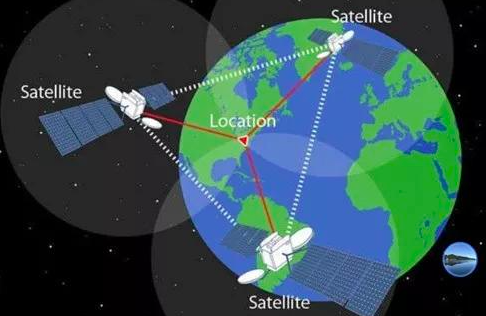
2.2 差分定位
差分定位原理是確定一個(gè)參考站,參考站跟衛(wèi)星發(fā)生通信,得到當(dāng)前位置的誤差,也叫做差分校正量。然后流動(dòng)站就是汽車,通過差分校正量為汽車的真實(shí)定位做校正。差分定位是一種提升GPS定位準(zhǔn)確率的技術(shù)方案。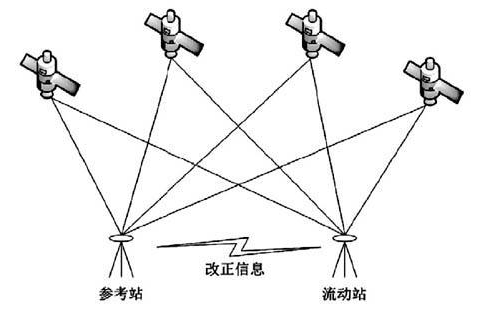
2.3 慣性定位
慣性定位不依賴任何光電技術(shù)。僅依賴于汽車當(dāng)前的加速度,通過積分可以獲得車的下一時(shí)間段的位移,當(dāng)車速較快的時(shí)候,慣性定位會(huì)是衛(wèi)星定位的很好地補(bǔ)充。
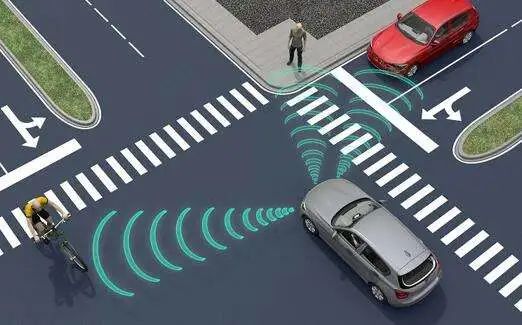
V2X(Vehicle to Everything)技術(shù)指的是車用無線通信技術(shù),通過通信去連接其他應(yīng)用,從而衍生出V2R(Vehicle to Road)、V2I(Vehicle to Infrastruction)、V2P(Vehicle to Prestrian)。
3.1 V2R
V2R技術(shù)指的是車輛間的通信,比如有一輛車要轉(zhuǎn)向了,那么通過與后方車輛的通信,讓后方車輛可以提前做避讓。

3.2 V2I\V2P
這兩個(gè)可以放到一起介紹,V2I指的是跟一些紅綠燈等設(shè)施的通信。V2P可能是與一些行人的手表、手機(jī)相關(guān)的通信。
環(huán)境感知和定位主要起到的是確定外界環(huán)境狀態(tài)的作用,為路徑的決策和規(guī)劃提供依據(jù)。在決策規(guī)劃模塊,主要解決的問題是車輛該怎么走的問題。這里面又分為兩個(gè)方面,分別是路徑的規(guī)劃和行為的決策。
1.路徑規(guī)劃
路徑規(guī)劃其實(shí)是高精度地圖領(lǐng)域的技術(shù)。傳統(tǒng)的人駕駛模式,如果地圖導(dǎo)航出現(xiàn)了失誤其實(shí)可以通過人肉修正。而自動(dòng)駕駛時(shí)代,地圖的準(zhǔn)確性以及導(dǎo)航的準(zhǔn)確性,將直接關(guān)乎安全性,所以自動(dòng)駕駛時(shí)代的高精度地圖技術(shù)非常重要。
那么如何在高精度地圖領(lǐng)域做路徑規(guī)劃,其實(shí)就是求兩點(diǎn)間最短路徑問題。因?yàn)樵谧詣?dòng)駕駛技術(shù)成熟后,很可能乘客上車設(shè)置一個(gè)目的地就開始睡覺了,剩下路怎么走相關(guān)問題就依賴于汽車的路徑規(guī)劃。
常用的求最短距離的算法有Dijkstra、Floyd、A*、RRT算法等。在后續(xù)的文章將會(huì)逐步介紹這些算法。
2.行為決策
因?yàn)檐囕v自動(dòng)駕駛問題不是單一變量問題,車輛在形式的過程中既包含車本身的行為,也包含道路上其它行人、汽車的行為。所以行為決策主要包含兩個(gè)方面,一個(gè)是車輛自己的形式?jīng)Q策,另一個(gè)是對(duì)于其它行駛車輛的行為的預(yù)測(cè)。
2.1 對(duì)交通參與方的預(yù)測(cè)
對(duì)于交通參與方的預(yù)測(cè)可以通過多種算法來實(shí)現(xiàn),構(gòu)建一套運(yùn)動(dòng)模型的方式。但是有的人會(huì)問?道路上其它車輛加速轉(zhuǎn)彎等行為是存在很大不確定性的,這種情況怎么構(gòu)建預(yù)測(cè)模型呢。
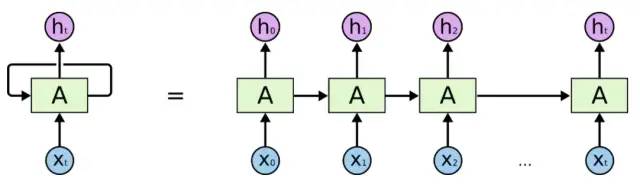
比較常用的解法是通過高斯噪聲來代表交通參與者運(yùn)動(dòng)的不確定性,因?yàn)榇蟛糠謪⑴c方的行為一定是服從正態(tài)分布的,所以整個(gè)模型構(gòu)建可以看作是一個(gè)高斯過程。對(duì)于交通參與方的行為和意圖的預(yù)測(cè),可以看作是一個(gè)動(dòng)態(tài)的時(shí)序過程,可以用深度學(xué)習(xí)LSTM這樣的循環(huán)神經(jīng)網(wǎng)絡(luò)解決相應(yīng)的問題。
2.2 車輛自身的行為決策
說回車輛自身,需要決策的指令集包含:行駛、跟車、轉(zhuǎn)彎、換道、停車等。車輛如何做決策,或者做什么樣的決策,需要放到一個(gè)場景下去判別。

整體流程應(yīng)該分為4個(gè)步驟,首先感知環(huán)境的變化,比如前方有車并道了,然后做場景判斷,前方有車并道場景該調(diào)取什么樣的模型做預(yù)測(cè),最終的行為輸出可能是減速或者自己并到另一個(gè)道路。這中間的判斷過程還要考慮其它車輛行為,以及是否符合道路規(guī)章制度。
每次行為的整體決策鏈路非常長,而且每一步?jīng)Q策相互影響,所以這種自動(dòng)駕駛車輛行為決策的功能可以看成是一系列概率的加成,可以看成是馬爾科夫決策過程。
經(jīng)過環(huán)境感知和決策規(guī)劃之后,就到了執(zhí)行控制的環(huán)節(jié)。如何將決策傳遞給車輛的功能部件,把油門、制動(dòng)、轉(zhuǎn)向、換擋指令落實(shí),是制動(dòng)控制的關(guān)鍵,也是標(biāo)準(zhǔn)的動(dòng)力學(xué)原理。
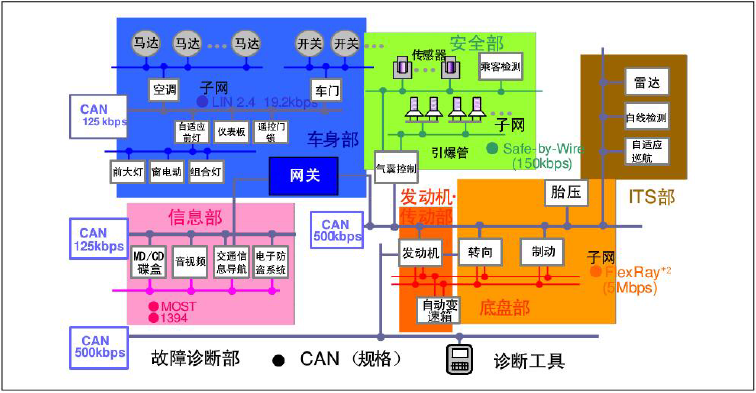
自動(dòng)駕駛汽車目前比較可行的方案是通過CAN電力總線去控制每個(gè)部件的行為,將指令通過電子信號(hào)傳達(dá)到每個(gè)部件,這也是目前電動(dòng)汽車的主要傳感方式。CAN總線的關(guān)鍵環(huán)節(jié)是如何通過電信號(hào)將指令發(fā)送以及接收,另外就是時(shí)間響應(yīng)問題。這一套技術(shù)隨著電動(dòng)汽車的發(fā)展,相對(duì)比較成熟,就不過多介紹。
本文是我學(xué)習(xí)自動(dòng)駕駛技術(shù)的開篇,還有很多不成熟,后續(xù)會(huì)不斷修訂。這篇文章是綜述,把自動(dòng)駕駛技術(shù)切分成環(huán)境感知和定位、決策規(guī)劃、執(zhí)行控制3個(gè)模塊,后續(xù)會(huì)針對(duì)每個(gè)模塊的具體算法以及原理進(jìn)行詳細(xì)的學(xué)習(xí)和分享。
感謝清華出版社的<自動(dòng)駕駛系列叢書>,感謝在學(xué)習(xí)過程中和我一起討論并給與幫助的朋友們。
