
我竟然用OpenCV實(shí)現(xiàn)了卡爾曼濾波
點(diǎn)擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)

本文轉(zhuǎn)載自:OpenCV學(xué)堂(CVSCHOOL)
卡爾曼濾波原理
卡爾曼濾波最早可以追溯到Wiener濾波,不同的是卡爾曼采用狀態(tài)空間來描述它的濾波器,卡爾曼濾波器同時(shí)具有模糊/平滑與預(yù)測功能,特別是后者在視頻分析與對象跟蹤應(yīng)用場景中被發(fā)揚(yáng)光大,在離散空間(圖像或者視頻幀)使用卡爾曼濾波器相對簡單。假設(shè)我們根據(jù)一個(gè)處理想知道一個(gè)變量值如下:
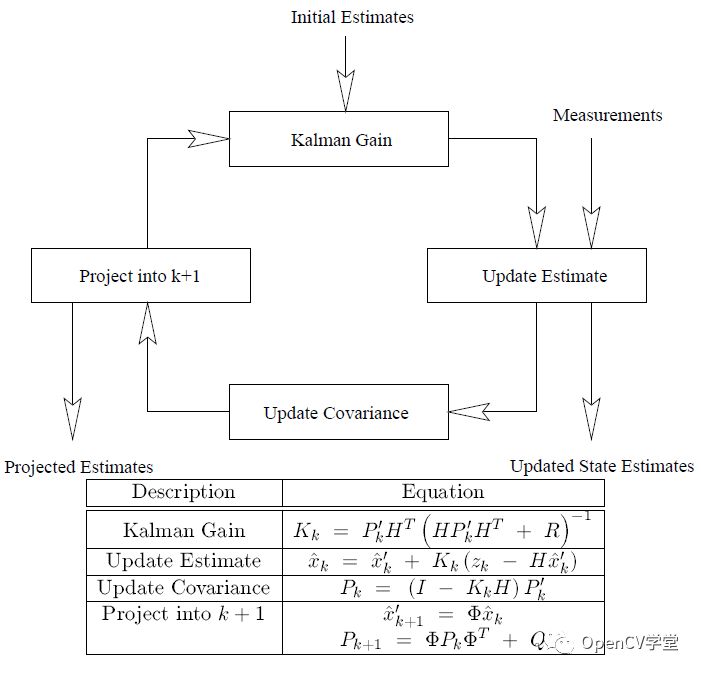
最終卡爾曼濾波完整的評估與空間預(yù)測模型工作流程如下:
OpenCV API
cv::KalmanFilter::KalmanFilter(
int dynamParams,
int measureParams,
int controlParams = 0,
int type = CV_32F
)
# dynamParams表示state的維度
# measureParams表示測量維度
# controlParams表示控制向量
# type表示創(chuàng)建的matrices
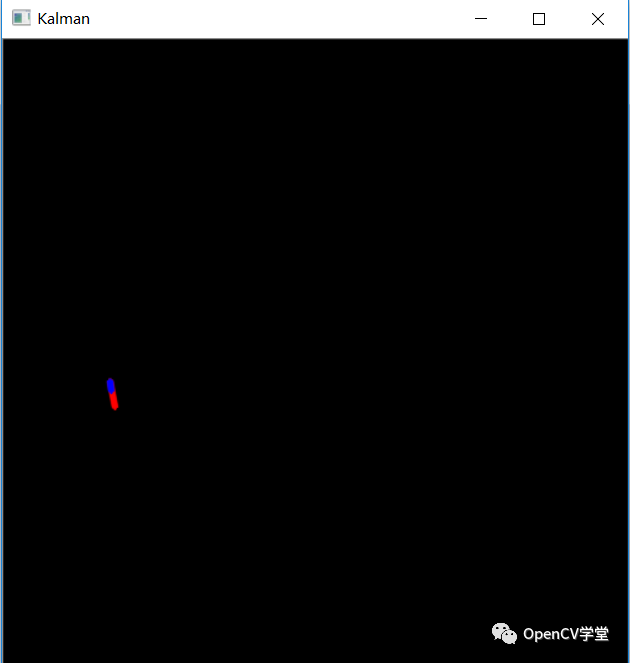
代碼演示
import cv2
from math import cos, sin, sqrt
import numpy as np
if __name__ == "__main__":
img_height = 500
img_width = 500
kalman = cv2.KalmanFilter(2, 1, 0)
cv2.namedWindow("Kalman", cv2.WINDOW_AUTOSIZE)
while True:
state = 0.1 * np.random.randn(2, 1)
# 初始化
kalman.transitionMatrix = np.array([[1., 1.], [0., 1.]])
kalman.measurementMatrix = 1. * np.ones((1, 2))
kalman.processNoiseCov = 1e-5 * np.eye(2)
kalman.measurementNoiseCov = 1e-1 * np.ones((1, 1))
kalman.errorCovPost = 1. * np.ones((2, 2))
kalman.statePost = 0.1 * np.random.randn(2, 1)
while True:
def calc_point(angle):
return (np.around(img_width/2 + img_width/3*cos(angle), 0).astype(int),
np.around(img_height/2 - img_width/3*sin(angle), 1).astype(int))
state_angle = state[0, 0]
state_pt = calc_point(state_angle)
# 預(yù)測
prediction = kalman.predict()
predict_angle = prediction[0, 0]
predict_pt = calc_point(predict_angle)
measurement = kalman.measurementNoiseCov * np.random.randn(1, 1)
# 生成測量
measurement = np.dot(kalman.measurementMatrix, state) + measurement
measurement_angle = measurement[0, 0]
measurement_pt = calc_point(measurement_angle)
# plot points
def draw_cross(center, color, d):
cv2.line(img,
(center[0] - d, center[1] - d), (center[0] + d, center[1] + d),
color, 1, cv2.LINE_AA, 0)
cv2.line(img,
(center[0] + d, center[1] - d), (center[0] - d, center[1] + d),
color, 1, cv2.LINE_AA, 0)
img = np.zeros((img_height, img_width, 3), np.uint8)
cv2.line(img, state_pt, measurement_pt, (0, 0, 255), 3, cv2.LINE_AA, 0)
cv2.line(img, state_pt, predict_pt, (255, 0, 0), 3, cv2.LINE_AA, 0)
# 校正預(yù)測與測量值差異
kalman.correct(measurement)
# 更新noise矩陣與狀態(tài)
process_noise = sqrt(kalman.processNoiseCov[0,0]) * np.random.randn(2, 1)
state = np.dot(kalman.transitionMatrix, state) + process_noise
cv2.imshow("Kalman", img)
code = cv2.waitKey(100)
if code != -1:
break
if code in [27, ord('q'), ord('Q')]:
break
cv2.destroyWindow("Kalman")
好消息,小白學(xué)視覺團(tuán)隊(duì)的知識星球開通啦,為了感謝大家的支持與厚愛,團(tuán)隊(duì)決定將價(jià)值149元的知識星球現(xiàn)時(shí)免費(fèi)加入。各位小伙伴們要抓住機(jī)會哦!
下載1:OpenCV-Contrib擴(kuò)展模塊中文版教程 在「小白學(xué)視覺」公眾號后臺回復(fù):擴(kuò)展模塊中文教程,即可下載全網(wǎng)第一份OpenCV擴(kuò)展模塊教程中文版,涵蓋擴(kuò)展模塊安裝、SFM算法、立體視覺、目標(biāo)跟蹤、生物視覺、超分辨率處理等二十多章內(nèi)容。 下載2:Python視覺實(shí)戰(zhàn)項(xiàng)目52講 在「小白學(xué)視覺」公眾號后臺回復(fù):Python視覺實(shí)戰(zhàn)項(xiàng)目,即可下載包括圖像分割、口罩檢測、車道線檢測、車輛計(jì)數(shù)、添加眼線、車牌識別、字符識別、情緒檢測、文本內(nèi)容提取、面部識別等31個(gè)視覺實(shí)戰(zhàn)項(xiàng)目,助力快速學(xué)校計(jì)算機(jī)視覺。 下載3:OpenCV實(shí)戰(zhàn)項(xiàng)目20講 在「小白學(xué)視覺」公眾號后臺回復(fù):OpenCV實(shí)戰(zhàn)項(xiàng)目20講,即可下載含有20個(gè)基于OpenCV實(shí)現(xiàn)20個(gè)實(shí)戰(zhàn)項(xiàng)目,實(shí)現(xiàn)OpenCV學(xué)習(xí)進(jìn)階。 交流群
歡迎加入公眾號讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測、分割、識別、醫(yī)學(xué)影像、GAN、算法競賽等微信群(以后會逐漸細(xì)分),請掃描下面微信號加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三 + 上海交大 + 視覺SLAM“。請按照格式備注,否則不予通過。添加成功后會根據(jù)研究方向邀請進(jìn)入相關(guān)微信群。請勿在群內(nèi)發(fā)送廣告,否則會請出群,謝謝理解~


評論
圖片
表情