
OpenCV中導(dǎo)向?yàn)V波介紹與應(yīng)用
點(diǎn)擊上方“小白學(xué)視覺(jué)”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)

導(dǎo)向?yàn)V波介紹
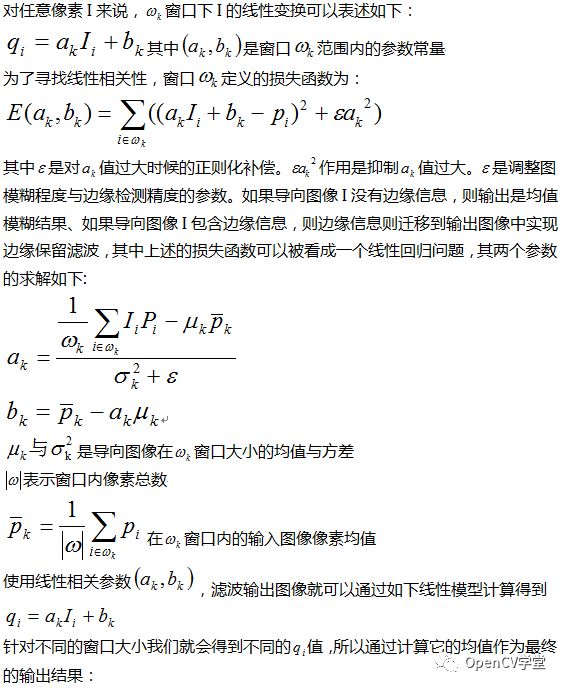
導(dǎo)向?yàn)V波是使用導(dǎo)向圖像作為濾波內(nèi)容圖像,在導(dǎo)向圖像上實(shí)現(xiàn)局部線性函數(shù)表達(dá),實(shí)現(xiàn)各種不同的線性變換,輸出變形之后的導(dǎo)向?yàn)V波圖像。根據(jù)需要,導(dǎo)向圖像可以跟輸入圖像不同或者一致。假設(shè)I是導(dǎo)向圖像、p是輸入圖像、q是導(dǎo)向?yàn)V波輸出圖像,導(dǎo)向?yàn)V波是作為局部線性模型描述導(dǎo)向圖像I與輸出圖像q之間的關(guān)系。
導(dǎo)向?yàn)V波算法實(shí)現(xiàn)的一般步驟為:
讀取導(dǎo)向圖像I與輸入圖像P
輸入?yún)?shù) 與 其中 表示窗口半徑大小,單位是像素, 表示模糊程度
積分圖計(jì)算I的均值與方差、輸入圖像的均值以及I與P的乘積IP
計(jì)算線性相關(guān)因子a與b
a=(IP-meanImeanP)/(Var_I+ )
b=meanP-ameanI
計(jì)算a與b的均值
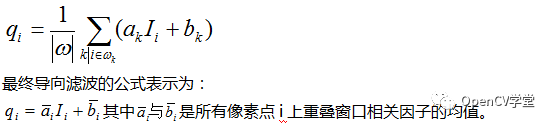
使用均值得到導(dǎo)向?yàn)V波結(jié)果Q=meana*I+meanb
導(dǎo)向?yàn)V波最常用四個(gè)功能是:
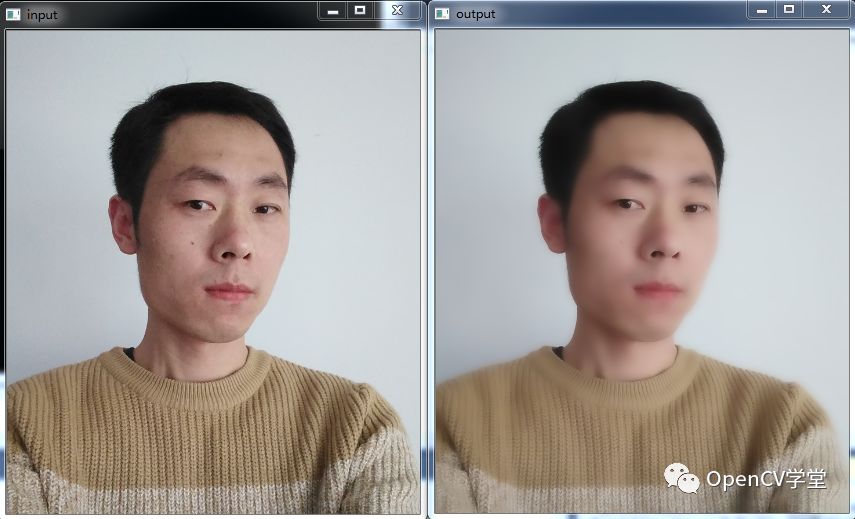
邊緣保留濾波
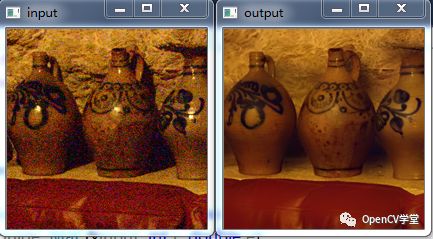
圖像去噪聲
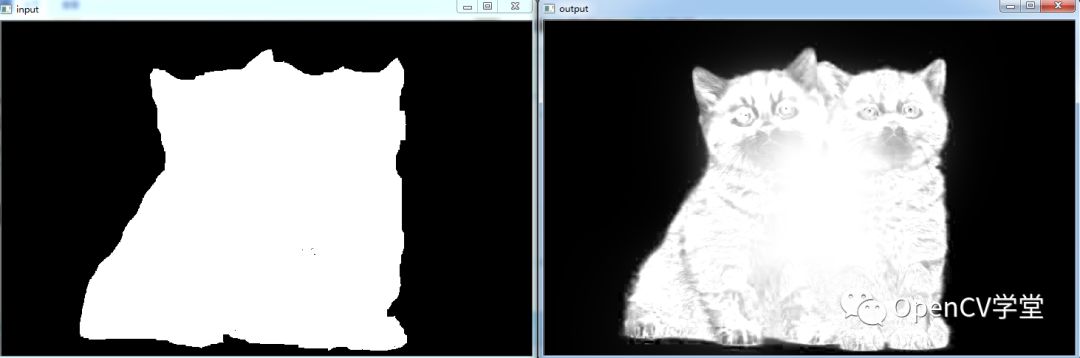
圖像邊緣羽化
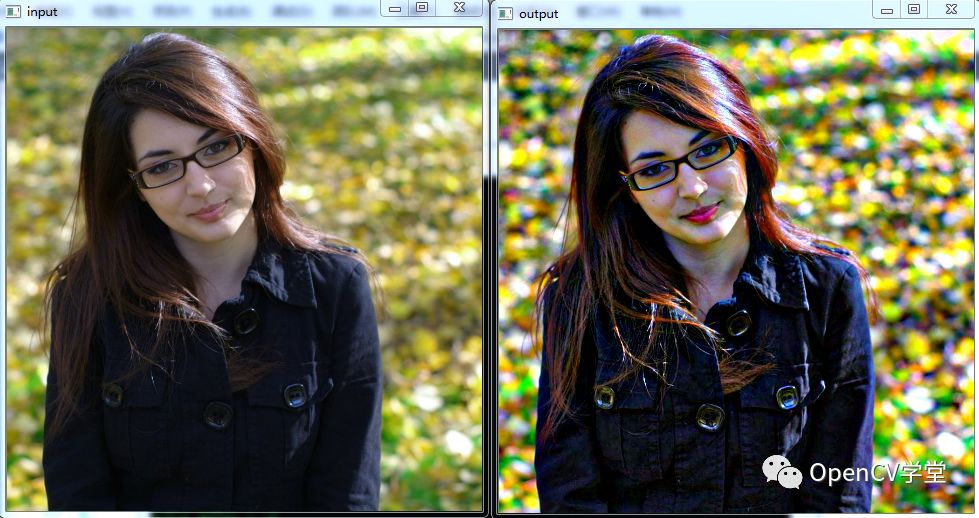
圖像增強(qiáng)(對(duì)比度)
OpenCV中導(dǎo)向?yàn)V波函數(shù)
由于導(dǎo)向?yàn)V波計(jì)算均值與方差可以通過(guò)積分圖查找快速得到,因此導(dǎo)向?yàn)V波的速度會(huì)很快,作為邊緣保留濾波它比雙線性濾波有明顯的速度優(yōu)勢(shì),OpenCV中在擴(kuò)展模塊ximgproc中實(shí)現(xiàn)了圖像的導(dǎo)向?yàn)V波函數(shù),相關(guān)API函數(shù)與參數(shù)解釋如下:
void cv::ximgproc::guidedFilter ? ?( ?
? ?InputArray guide,// 導(dǎo)向圖像
? ?InputArray src,// 輸入下
? ?OutputArray dst,//導(dǎo)向?yàn)V波輸出
? ?int radius,//窗口半徑大小
? ?double eps,// 模糊程度
? ?int dDepth = -1// 輸出圖像深度
)
eps值越大圖像模糊程度越大、半徑radius值越大圖像模糊程度越高。
代碼演示
通過(guò)代碼演示了導(dǎo)向?yàn)V波根據(jù)輸入的導(dǎo)向圖像不一樣分別實(shí)現(xiàn)了圖像濾波的邊緣保留、去噪聲、羽化、對(duì)比度提升功能。完整的演示代碼如下:
#include
#include
#include
using namespace cv;
using namespace cv::ximgproc;
using namespace std;
void guide_demo(Mat &guide, Mat &input, int r, double e);
void enhance_demo(Mat &guide, Mat &input, int r, double e);
int main(int argc, char** argv) {
? ?Mat src = imread("D:/vcprojects/images/guide.png");
? ?if (src.empty()) {
? ? ? ?printf("could not load image...\n");
? ? ? ?return -1;
? ?}
? ?namedWindow("input", CV_WINDOW_AUTOSIZE);
? ?imshow("input", src);
? ?namedWindow("output", CV_WINDOW_AUTOSIZE);
? ?int r = 2;
? ?double eps = 0.1;
? ?int type = 0;
? ?while (true) {
? ? ? ?char c = waitKey(50);
? ? ? ?printf("input digit : %d\n", c);
? ? ? ?if (c == 49) { // 邊緣保留
? ? ? ? ? ?type = 1;
? ? ? ?}
? ? ? ?else if (c == 50) {
? ? ? ? ? ?type = 2;
? ? ? ?}
? ? ? ?else if (c == 51) {
? ? ? ? ? ?type = 3;
? ? ? ?}
? ? ? ?else if (c == 52) { // 去噪
? ? ? ? ? ?type = 4;
? ? ? ?}
? ? ? ?else if (c == 53) { // 羽化
? ? ? ? ? ?type = 5;
? ? ? ?}
? ? ? ?else if (c == 54) { // 提升
? ? ? ? ? ?type = 6;
? ? ? ?}
? ? ? ?else if (c == 27) {
? ? ? ? ? ?break;
? ? ? ?}
? ? ? ?if (type == 0 || type == 1 || type == 2 || type == 3) {
? ? ? ? ? ?guide_demo(src, src, pow(r, type), eps*eps * pow(r, type));
? ? ? ?}
? ? ? ?else if(type == 4){
? ? ? ? ? ?Mat guide = imread("D:/vcprojects/images/gf_guide.png");
? ? ? ? ? ?Mat input = imread("D:/vcprojects/images/gf_noise.png");
? ? ? ? ? ?imshow("input", input);
? ? ? ? ? ?guide_demo(guide, input, 8, 0.02*0.02);
? ? ? ?}
? ? ? ?else if (type == 5) {
? ? ? ? ? ?Mat guide = imread("D:/vcprojects/images/twocat.png");
? ? ? ? ? ?Mat input = imread("D:/vcprojects/images/twocat_mask.png", IMREAD_GRAYSCALE);
? ? ? ? ? ?imshow("input", input);
? ? ? ? ? ?guide_demo(guide, input, 60, 10e-6);
? ? ? ?}
? ? ? ?else {
? ? ? ? ? ?Mat input = cv::imread("D:/vcprojects/images/demo.png");
? ? ? ? ? ?input.convertTo(input, CV_32F, 1.0 / 255.0);
? ? ? ? ? ?imshow("input", input);
? ? ? ? ? ?int r = 16;
? ? ? ? ? ?double eps = 0.1 * 0.1;
? ? ? ? ? ?enhance_demo(input, input, r, eps);
? ? ? ?}
? ?}
? ?waitKey(0);
? ?return 0;
}
void guide_demo(Mat &guide, Mat &input, int r, double e) {
? ?double eps = e * 255 * 255;
? ?Mat dst;
? ?guidedFilter(guide, input, dst, r, eps, -1);
? ?imshow("output", dst);
}
void enhance_demo(Mat &guide, Mat &input, int r, double e) {
? ?Mat dst;
? ?guidedFilter(guide, input, dst, r, e, -1);
? ?Mat result = (guide - dst) * 5 + dst;
? ?imshow("output", result);
}
運(yùn)行截圖如下:
邊緣保留
去噪聲
邊緣羽化
對(duì)比度提升
交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺(jué)、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三?+?上海交大?+?視覺(jué)SLAM“。請(qǐng)按照格式備注,否則不予通過(guò)。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~