
簡(jiǎn)單的梯度下降算法,你真的懂了嗎?
點(diǎn)擊上方“小白學(xué)視覺(jué)”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時(shí)間送達(dá)

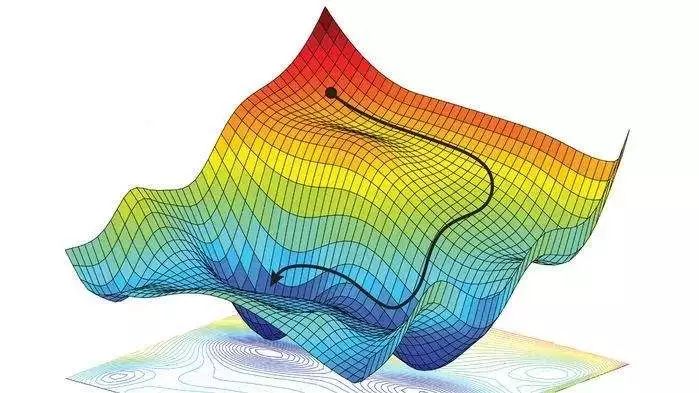
梯度下降算法的公式非常簡(jiǎn)單,”沿著梯度的反方向(坡度最陡)“是我們?nèi)粘=?jīng)驗(yàn)得到的,其本質(zhì)的原因到底是什么呢?為什么局部下降最快的方向就是梯度的負(fù)方向呢?也許很多朋友還不太清楚。沒(méi)關(guān)系,接下來(lái)我將以通俗的語(yǔ)言來(lái)詳細(xì)解釋梯度下降算法公式的數(shù)學(xué)推導(dǎo)過(guò)程。
假設(shè)我們位于黃山的某個(gè)山腰處,山勢(shì)連綿不絕,不知道怎么下山。于是決定走一步算一步,也就是每次沿著當(dāng)前位置最陡峭最易下山的方向前進(jìn)一小步,然后繼續(xù)沿下一個(gè)位置最陡方向前進(jìn)一小步。這樣一步一步走下去,一直走到覺(jué)得我們已經(jīng)到了山腳。這里的下山最陡的方向就是梯度的負(fù)方向。
首先理解什么是梯度?通俗來(lái)說(shuō),梯度就是表示某一函數(shù)在該點(diǎn)處的方向?qū)?shù)沿著該方向取得最大值,即函數(shù)在當(dāng)前位置的導(dǎo)數(shù)。
上式中,θ?是自變量,f(θ)?是關(guān)于?θ?的函數(shù),θ?表示梯度。
如果函數(shù)?f(θ)?是凸函數(shù),那么就可以使用梯度下降算法進(jìn)行優(yōu)化。梯度下降算法的公式我們已經(jīng)很熟悉了:

其中,θo?是自變量參數(shù),即下山位置坐標(biāo),η?是學(xué)習(xí)因子,即下山每次前進(jìn)的一小步(步進(jìn)長(zhǎng)度),θ?是更新后的?θo,即下山移動(dòng)一小步之后的位置。
這里需要一點(diǎn)數(shù)學(xué)基礎(chǔ),對(duì)泰勒展開(kāi)式有些了解。簡(jiǎn)單地來(lái)說(shuō),一階泰勒展開(kāi)式利用的就是函數(shù)的局部線性近似這個(gè)概念。我們以一階泰勒展開(kāi)式為例:

不懂上面的公式?沒(méi)有關(guān)系。我用下面這張圖來(lái)解釋。
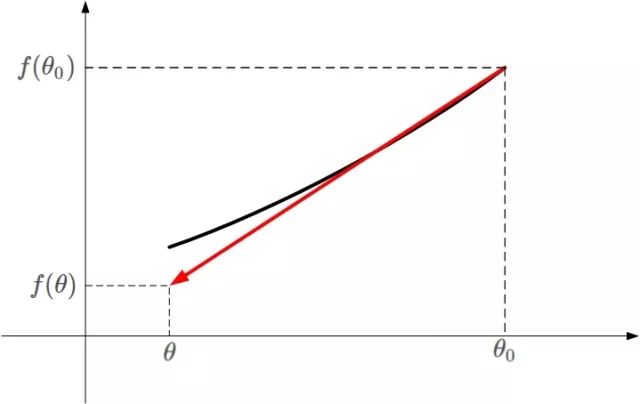
凸函數(shù)?f(θ)?的某一小段 [θo,θ] 由上圖黑色曲線表示,可以利用線性近似的思想求出?f(θ)?的值,如上圖紅色直線。該直線的斜率等于?f(θ)?在?θo?處的導(dǎo)數(shù)。則根據(jù)直線方程,很容易得到?f(θ)?的近似表達(dá)式為:

這就是一階泰勒展開(kāi)式的推導(dǎo)過(guò)程,主要利用的數(shù)學(xué)思想就是曲線函數(shù)的線性擬合近似。
知道了一階泰勒展開(kāi)式之后,接下來(lái)就是重點(diǎn)了!我們來(lái)看一下梯度下降算法是如何推導(dǎo)的。
先寫(xiě)出一階泰勒展開(kāi)式的表達(dá)式:

其中,θ?θo?是微小矢量,它的大小就是我們之前講的步進(jìn)長(zhǎng)度?η,類比于下山過(guò)程中每次前進(jìn)的一小步,η?為標(biāo)量,而?θ?θo?的單位向量用?v?表示。則?θ?θo?可表示為:

特別需要注意的是,θ?θo?不能太大,因?yàn)樘蟮脑挘€性近似就不夠準(zhǔn)確,一階泰勒近似也不成立了。替換之后,f(θ)?的表達(dá)式為:

重點(diǎn)來(lái)了,局部下降的目的是希望每次?θ?更新,都能讓函數(shù)值?f(θ)?變小。也就是說(shuō),上式中,我們希望?f(θ)

因?yàn)?η?為標(biāo)量,且一般設(shè)定為正值,所以可以忽略,不等式變成了:

上面這個(gè)不等式非常重要!v?和??f(θo)?都是向量,?f(θo)?是當(dāng)前位置的梯度方向,v?表示下一步前進(jìn)的單位向量,是需要我們求解的,有了它,就能根據(jù)?vθ?θo=ηv?確定?θ?值了。
想要兩個(gè)向量的乘積小于零,我們先來(lái)看一下兩個(gè)向量乘積包含哪幾種情況:

A?和?B?均為向量,α?為兩個(gè)向量之間的夾角。A?和?B?的乘積為:

||A|| 和 ||B|| 均為標(biāo)量,在 ||A|| 和 ||B|| 確定的情況下,只要 cos(α)=?1,即?A?和?B?完全反向,就能讓?A?和?B?的向量乘積最小(負(fù)最大值)。
顧名思義,當(dāng)?v?與??f(θo)?互為反向,即?v?為當(dāng)前梯度方向的負(fù)方向的時(shí)候,能讓?v??f(θo)?最大程度地小,也就保證了?v?的方向是局部下降最快的方向。
知道 v 是??f(θo)?的反方向后,可直接得到:
之所以要除以??f(θo)?的模 ||?f(θo)||,是因?yàn)?v?是單位向量。
求出最優(yōu)解?v?之后,帶入到?θ?θo=ηv?中,得:
一般地,因?yàn)?||?f(θo)|| 是標(biāo)量,可以并入到步進(jìn)因子?η?中,即簡(jiǎn)化為:

這樣,我們就推導(dǎo)得到了梯度下降算法中?θ?的更新表達(dá)式。
我們通過(guò)一階泰勒展開(kāi)式,利用線性近似和向量相乘最小化的思想搞懂了梯度下降算法的數(shù)學(xué)原理。也許你之前很熟悉梯度下降算法,但也許對(duì)它的推導(dǎo)過(guò)程并不清楚。看了本文,你是否有所收獲呢?
交流群
歡迎加入公眾號(hào)讀者群一起和同行交流,目前有SLAM、三維視覺(jué)、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測(cè)、分割、識(shí)別、醫(yī)學(xué)影像、GAN、算法競(jìng)賽等微信群(以后會(huì)逐漸細(xì)分),請(qǐng)掃描下面微信號(hào)加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三?+?上海交大?+?視覺(jué)SLAM“。請(qǐng)按照格式備注,否則不予通過(guò)。添加成功后會(huì)根據(jù)研究方向邀請(qǐng)進(jìn)入相關(guān)微信群。請(qǐng)勿在群內(nèi)發(fā)送廣告,否則會(huì)請(qǐng)出群,謝謝理解~