
點(diǎn)特征直方圖
平面的法向矢量是垂直于平面的單位矢量,并且表面上某個(gè)點(diǎn)的法向矢量定義為垂直于與曲面相切的平面的矢量。檢測點(diǎn)的法線向量的計(jì)算主要包括基于表面網(wǎng)格的求解方法和基于周圍鄰域中的點(diǎn)的分布的求解方法。
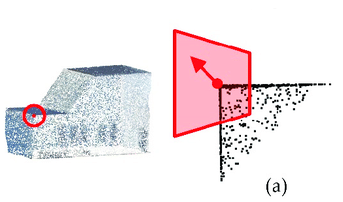
用于正常估計(jì)的不同區(qū)域
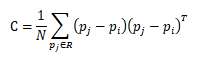
法線向量所在的軸是鄰域分布的最分散方向。假設(shè)距N個(gè)檢測點(diǎn)的距離的半徑位于r的附近,則相鄰點(diǎn)與查詢點(diǎn)p_i之間的協(xié)方差矩陣為:
點(diǎn)特征直方圖(PFH)通過使用圍繞點(diǎn)的多維直方圖的平均曲率來編碼點(diǎn)的k個(gè)最近鄰點(diǎn)的幾何特性。這個(gè)高維空間提供了一些有用的特征表示,并且可以應(yīng)不同采樣密度和噪聲。
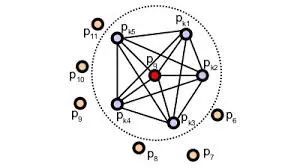
PFH的影響范圍
半徑為r的球體內(nèi)的中心點(diǎn)及其所有相鄰點(diǎn)相互連接以形成網(wǎng)絡(luò)。最終的PFH幾何特征將是通過計(jì)算鄰域中所有對點(diǎn)之間的變化關(guān)系而獲得的直方圖。
為了計(jì)算給定兩個(gè)點(diǎn)和,pi和pj以及它們相關(guān)的法線ns和nj兩者之間的相對差,我們在特定點(diǎn)處定義了固定坐標(biāo)系。
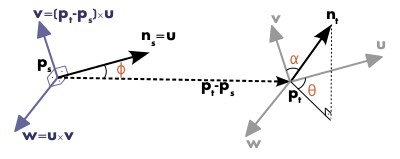
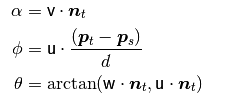
使用上面的uvw坐標(biāo)系,可以將ns法線和ni法線之間的差分解為以下3個(gè)角度差
首先,對于每個(gè)點(diǎn),使用類似于PFH的方法來計(jì)算三元組,并獲得簡化的點(diǎn)特征直方圖,稱為SPFH。
使用加權(quán)的鄰近SPFH來計(jì)算直方圖的最終值,如下所示:

參考文獻(xiàn)
Rusu R B, Marton Z C, Blodow N, et al. Learning informative point classes for the acquisition of object model maps[C]//Control, Automation, Robotics and Vision, 2008. ICARCV 2008. 10th International Conference on. IEEE, 2008: 643–650
Zhao X, Wang H, Komura T. Indexing 3d scenes using the interaction bisector surface[J]. ACM Transactions on Graphics (TOG), 2014, 33(3): 22.
Wahl E, Hillenbrand U, Hirzinger G. Surflet-pair-relation histograms: a statistical 3D-shape representation for rapid classification[C]//3-D Digital Imaging and Modeling, 2003. 3DIM 2003. Proceedings. Fourth International Conference on. IEEE, 2003: 474–481.
Rusu R B, Blodow N, Beetz M. Fast point feature histograms (FPFH) for 3D registration[C]//Robotics and Automation, 2009. ICRA’09. IEEE International Conference on. IEEE, 2009: 3212–3217.
交流群
歡迎加入公眾號讀者群一起和同行交流,目前有SLAM、三維視覺、傳感器、自動(dòng)駕駛、計(jì)算攝影、檢測、分割、識別、醫(yī)學(xué)影像、GAN、算法競賽等微信群(以后會(huì)逐漸細(xì)分),請掃描下面微信號加群,備注:”昵稱+學(xué)校/公司+研究方向“,例如:”張三?+?上海交大?+?視覺SLAM“。請按照格式備注,否則不予通過。添加成功后會(huì)根據(jù)研究方向邀請進(jìn)入相關(guān)微信群。請勿在群內(nèi)發(fā)送廣告,否則會(huì)請出群,謝謝理解~