
基于深度學(xué)習(xí)的單目深度估計(jì)綜述
極市導(dǎo)讀
?本文是一篇關(guān)于單目深度估計(jì)方法的綜述文章,總結(jié)了基于深度學(xué)習(xí)的深度估計(jì)中被廣泛使用的數(shù)據(jù)集、評(píng)價(jià)指標(biāo)和重要的訓(xùn)練方法,并對(duì)該領(lǐng)域的未來(lái)提出展望。>>加入極市CV技術(shù)交流群,走在計(jì)算機(jī)視覺(jué)的最前沿
論文摘要
相關(guān)工作與介紹
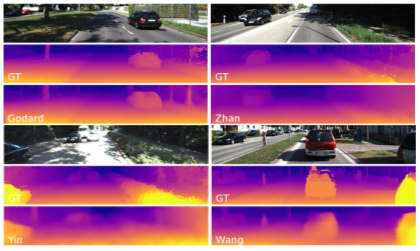
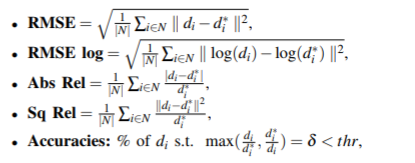
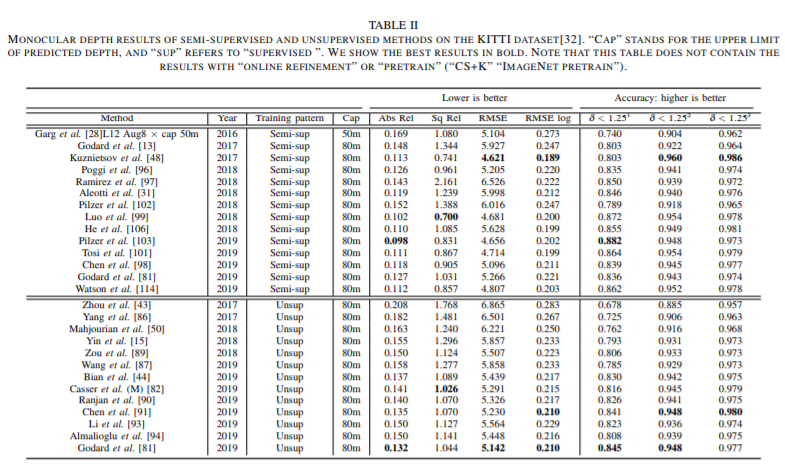
深度估計(jì)中的數(shù)據(jù)集和評(píng)價(jià)指標(biāo)
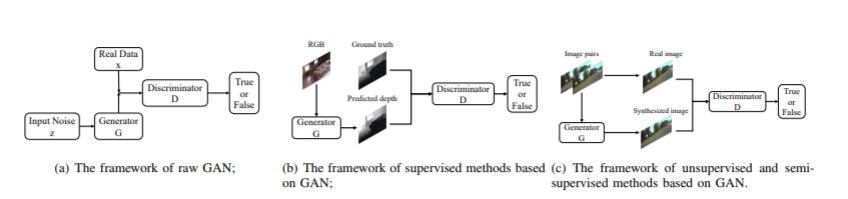
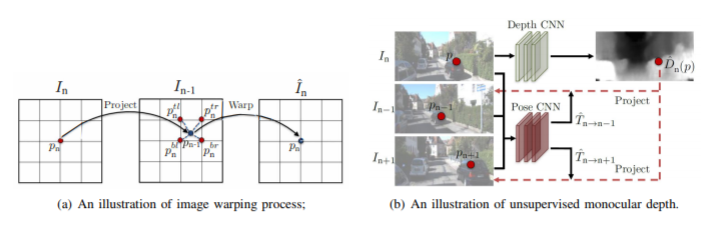
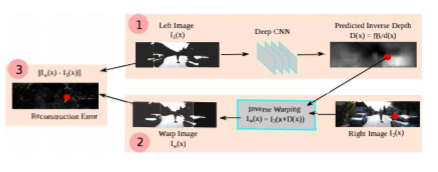
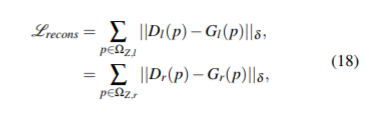
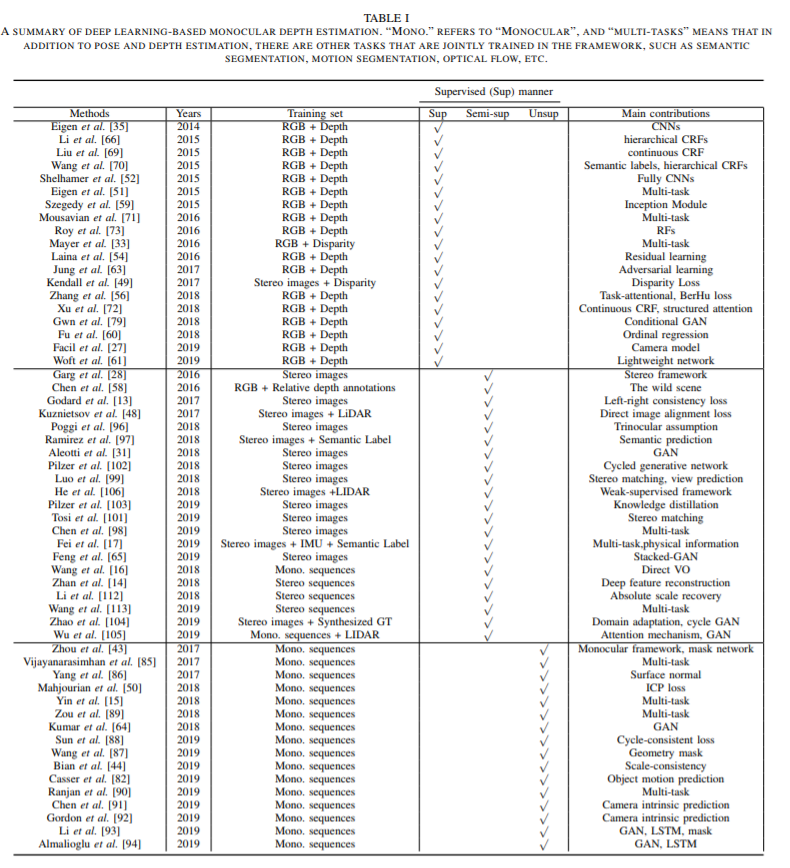
基于深度學(xué)習(xí)的單目深度估計(jì)

討論
總結(jié)
推薦閱讀
最新開(kāi)源無(wú)監(jiān)督單目深度估計(jì)方法,解決復(fù)雜室內(nèi)場(chǎng)景難訓(xùn)練問(wèn)題,效果性能遠(yuǎn)超SOTA
正式開(kāi)賽!ACCV 2020國(guó)際細(xì)粒度網(wǎng)絡(luò)圖像識(shí)別競(jìng)賽——是時(shí)候展現(xiàn)真正的技術(shù)了!
評(píng)論
圖片
表情