點擊上方“AI算法與圖像處理”,選擇加"星標"或“置頂”
重磅干貨,第一時間送達

計算機視覺是一項通過計算機系統(tǒng)分析圖像(包括視頻)的技術(shù)。越來越多的圖像處理算法促進計算機視覺在自動駕駛、工業(yè)機器人以及其領(lǐng)域的應(yīng)用。采礦和自然資源的加工變得越來越復(fù)雜,他們涉及在極其惡劣的條件下進行作業(yè)。無論是在幾公里深的煤礦中開采煤炭還是在海底鉆探油井,從事這些工作的人都面臨著嚴重的風(fēng)險,在危險條件下用機器代替人工更為可取。通過使用人工智能(AI),可任意實現(xiàn)這一目標。工業(yè)4.0意味著向全自動化數(shù)字生產(chǎn)的過渡,該過程由智能系統(tǒng)實時控制,同時不斷與環(huán)境進行交互。這個概念的核心是“數(shù)字”的創(chuàng)建,它是指對實際實物資產(chǎn)進行數(shù)字化。實施工業(yè) 4.0的前提條件是安裝傳感器收集有關(guān)過程的數(shù)據(jù)并進行分析。攝像機是最好的傳感器之一,計算機視覺系統(tǒng)可以獲取真實對象的視覺表示,過程并在后期進行分析以解決各種應(yīng)用任務(wù)。CV在工業(yè)中有很多實際應(yīng)用,從生產(chǎn)線上的產(chǎn)品質(zhì)量控制到安全監(jiān)控等等。這是計算機視覺領(lǐng)域中一些最常見的工業(yè)案例研究。人工視覺檢查的結(jié)果很大程度上取決于操作員的能力,經(jīng)驗和專心程度。這個相當費力過程會導(dǎo)致遺漏或分類錯誤等問題。為了減少人的影響,提高質(zhì)量控制過程的準確性和可靠性,可以采用計算機視覺系統(tǒng)。主要有以下兩種檢測方案,半成品的控制和成品的檢查。借助神經(jīng)網(wǎng)絡(luò),能夠檢測出92%-99%有缺陷的產(chǎn)品,誤報占3-4%。這樣的性能比率完全可以讓計算機視覺代替人力。遺漏的缺陷可能會導(dǎo)致非常嚴重問題,因此很多人已經(jīng)在研究這種情況了。除了視覺分析外,還有其他無損檢測方法,例如超聲,渦流和X射線控制。除傳統(tǒng)相機外,還可以使用有關(guān)物體表面溫度和幾何數(shù)據(jù)的信息。
現(xiàn)代計算機視覺系統(tǒng)能夠識別工業(yè)資產(chǎn)的潛在危險情況。根據(jù)指定的參數(shù)對事件進行跟蹤,可以最大程度地減少危險事件的發(fā)生,確保設(shè)備持續(xù)運行,并減少工傷風(fēng)險。通過使用攝像機和生產(chǎn)現(xiàn)場其他傳感器的數(shù)據(jù),可以保證人們更加安全地工作。其中包括對個人防護設(shè)備的磨損(頭盔,安全電纜,工作服,耳機)的控制以及人員在危險區(qū)域的存在。這種解決方案可自動檢測違規(guī)情況并向人員提供合理的反饋,從而形成安全的工作習(xí)慣。如果有人出現(xiàn)在危險區(qū)域中,則會觸發(fā)警報。借助視頻分析,還可以檢測出明火,管道破裂,泄漏,識別圍欄斷裂或任何試圖將物品帶出保護區(qū)之外并試圖檢測遺棄物體的情況。在某些地區(qū)(例如加油站等),也可以跟蹤吸煙者或移動電話的使用情況。除此之外還可以進行疲勞檢測。該系統(tǒng)跟蹤員工的活動改善任務(wù)分配管理。
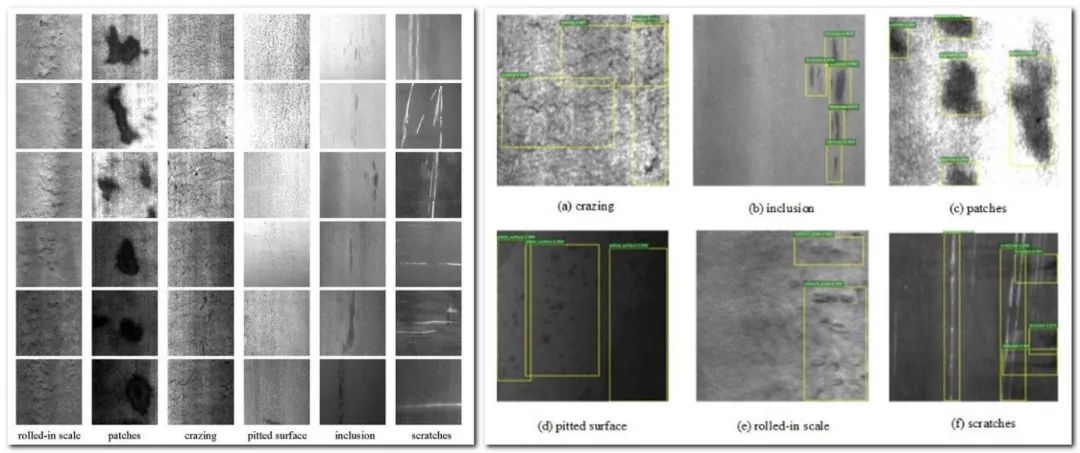
計算機視覺用于監(jiān)控生產(chǎn)設(shè)施和基礎(chǔ)設(shè)施。視頻分析的功能范圍包括對移動物體和車輛以及設(shè)備和人員位置的檢測和定位。可以超越人類的能力來精確地識別和跟蹤不同的活動。基于此監(jiān)視,智能任務(wù)分配可以提高生產(chǎn)率并增加整體設(shè)備使用率。礦石開采方面現(xiàn)在,我們可以對采礦和運輸過程中移動的礦石塊進行分類,計數(shù)和估算大小。巖石碎片分析使調(diào)整爆破操作成為可能。這樣的系統(tǒng)使過程生產(chǎn)率提高了3-4%。光學(xué)粒度儀可實時了解已完成的工作。一個相關(guān)的任務(wù)是監(jiān)視傳送帶上的碎石,以發(fā)現(xiàn)破碎和分選廠中的異常物體。送入設(shè)備以進行后續(xù)處理的礦石碎片尺寸估算值可以自動調(diào)整破碎機的模式,并實現(xiàn)最佳產(chǎn)量。設(shè)計用于在鉆孔過程后自動對巖石類型進行分類的系統(tǒng),有助于比人類更快,更準確地識別發(fā)現(xiàn)的礦物集合。還有一些監(jiān)控系統(tǒng)可以實時確定鏟斗挖掘機齒的存在。僅損失一顆鏟斗齒就使挖掘機的生產(chǎn)率降低了約1.3%。此外,如果牙齒到達破碎機,這可能會造成損壞和停機,相當于每小時$ 8,000,不包括搜索和維修費用。在丟失和損壞的情況下,給操作員的音頻信號可將這些負面影響降至最低。使用無人駕駛飛機進入危險區(qū)域:公司使用無人機監(jiān)控其資產(chǎn)和運營,采石場和水壩,并檢測管道基礎(chǔ)設(shè)施中的泄漏。還有一種解決方案,可以分析廢棄地下礦井的結(jié)構(gòu)和條件,以控制不安全條件下的沉降和水污染。借助這項技術(shù),巖土工程師可以更好地還原礦圖并安全地監(jiān)視其當前狀態(tài)。在冶金學(xué)中,計算機視覺具有控制質(zhì)量,確定合金的微觀結(jié)構(gòu)和機械性能以及尋找具有所需特性的新材料的潛力。事實證明,機器學(xué)習(xí)和專家的合理參與可以完美地解決合金評估的任務(wù)。從最初的發(fā)現(xiàn)到商業(yè)化,材料的設(shè)計和開發(fā)在過去花費了數(shù)十年的時間。通過使用存儲的實驗室數(shù)據(jù),計算機視覺可以發(fā)現(xiàn)材料,設(shè)計和預(yù)測其性能。由于晶粒結(jié)構(gòu)會影響鋼的開裂,因此可視化裂縫可用于鏈接宏觀機械和微觀結(jié)構(gòu)特性,以預(yù)測裂紋擴展路徑。冶金中的缺陷檢測技術(shù)具有其獨特的性質(zhì),除了傳統(tǒng)的攝像頭外,還需要使用其他分析工具。例如,通過顏色分析進行的表面溫度評估可以揭示有害礦物質(zhì)的污染程度以及工藝或反應(yīng)器條件。特別是,已經(jīng)成功地訓(xùn)練了神經(jīng)網(wǎng)絡(luò)來識別珍珠巖,鐵素體,馬氏體和滲碳體。
在過去的幾十年中,工業(yè)機器人對不同物體的捕獲和處理幾乎取代了體力勞動。工業(yè)機器人的第一個模型旨在執(zhí)行簡單的任務(wù)。現(xiàn)在,機器人和協(xié)作機器人可以使用抓斗或真空杯來重新放置對象。他們噴漆,彎線,執(zhí)行點焊和執(zhí)行其他常規(guī)操作。配備計算機視覺系統(tǒng)的現(xiàn)代機器人可以執(zhí)行任務(wù),任務(wù)的特點是工件的位置變化很大。機器人已經(jīng)在工業(yè)中使用了很長時間,但是AI才剛剛開始滲透到這一領(lǐng)域。從歷史上看,用于工業(yè)應(yīng)用的GPU計算是一個相當新的領(lǐng)域,工業(yè)計算機視覺涉及一系列傳感器,而不僅僅是視頻流。具有計算機視覺系統(tǒng)的機器人能夠通過分析3D攝像機的視頻流以及激光和傳感器數(shù)據(jù)來考慮對象的位置。這種方法使機器人幾乎可以在任何條件下高精度地執(zhí)行任務(wù)。具有計算機視覺的機器人需要更少的編程。在啟動之前,它們僅應(yīng)配置一次。此外,機器人還可以在幾乎沒有停機的情況下無縫切換任務(wù)。由于具有很高的靈活性,幾乎不需要編程,因此計算機視覺機器人無需知道零件的確切參數(shù)即可有效地完成工作。機器人的適應(yīng)性使他們可以選擇所需的零件,對其進行本地化并從任何位置進行分級。設(shè)備設(shè)置中的少量投資也是最明顯的好處之一。
Dex-Net 4.0是一個帶有手臂的機器人,以驚人的精度抓取物體。它能夠以每小時高達300個對象的速度捕獲95%的對象。它評估了幾個選項,可在幾秒鐘內(nèi)捕獲一個對象。人類每小時可以捕獲400到600個物體。計算機視覺繼續(xù)擴展工業(yè)機器人的功能,并找到提高常規(guī)任務(wù)生產(chǎn)率的新方法。隨著電子商務(wù)的發(fā)展,物流機器人已成為一個有前途的機器人領(lǐng)域。他們服務(wù)于貨物交付并與人類合作。他們可以運輸重達15公斤的貨物,在困難的條件下航行并在人與人之間有效地機動。自主移動機器人可以在不支持標記,電線,磁鐵或精確定位目標等基礎(chǔ)設(shè)施的情況下工作。它們提高了生產(chǎn)效率并降低了成本,因此成為生產(chǎn)環(huán)境的重要組成部分。倉庫機器人使亞馬遜能夠?qū)⒚總€倉庫的運營成本降低約20%(每年節(jié)省約2200萬美元)。根據(jù)麥肯錫全球研究所(MGI)的說法,由于各種操作自動化,整個行業(yè)節(jié)省的成本可能在15%到90%之間,具體取決于行業(yè)。
亞馬遜倉庫機器人
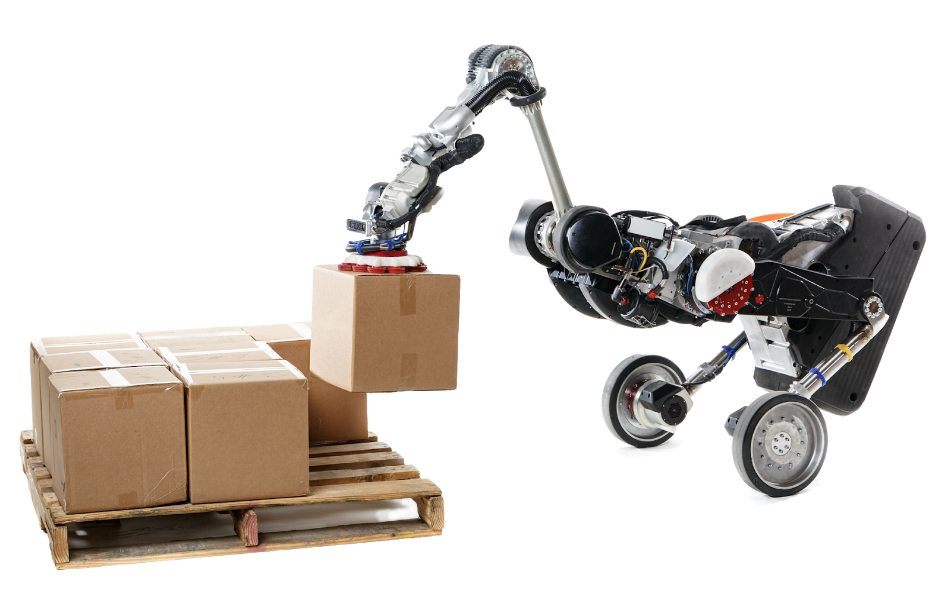
在計劃機器人操縱時,將使用計算機視覺來避免碰撞。算法的數(shù)據(jù)源是安裝在機器人上的激光雷達。首先檢測物體,然后開始運動跟蹤。機器人需要了解環(huán)境并預(yù)測其他人的運動,這在不斷變化的環(huán)境中移動時必不可少。導(dǎo)航并避免障礙;記住并考慮到行進的路徑并將自己定位在太空中-所有這些任務(wù)都可以使用計算機視覺原理來解決。已經(jīng)存在幾種類型的物流機器人,以及用于自動化倉儲的復(fù)雜解決方案,包括工業(yè)機械手,移動機器人手推車和碼垛機。波士頓動力公司于三月份推出了新的Handle機器人裝載機。它們比叉車快,能夠分揀托盤中的物品并將存儲單元轉(zhuǎn)移到傳送帶上。這些兩輪平衡機器人中的每一個都配備有機械手和真空手柄以及計算機視覺模型,該模型可以使其在倉庫中導(dǎo)航并選擇所需的架子和盒子。先進的計算機視覺和抓手將擴大物流機器人的應(yīng)用范圍。下載1:leetcode?開源書
在「AI算法與圖像處理」公眾號后臺回復(fù):leetcode,即可下載。每題都 runtime beats 100% 的開源好書,你值得擁有!
在「AI算法與圖像處理」公眾號后臺回復(fù):CVPR2020,即可下載1467篇CVPR?2020論文請注明:地區(qū)+學(xué)校/企業(yè)+研究方向+昵稱