
一文概覽目標(biāo)檢測領(lǐng)域進(jìn)展(數(shù)據(jù)集/2D/3D)
點(diǎn)擊上方“小白學(xué)視覺”,選擇加"星標(biāo)"或“置頂”
重磅干貨,第一時間送達(dá)
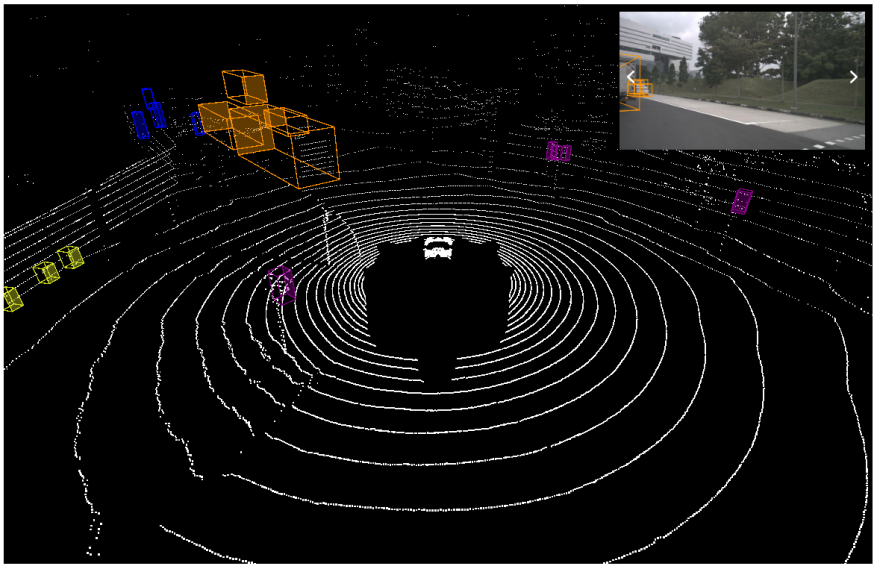
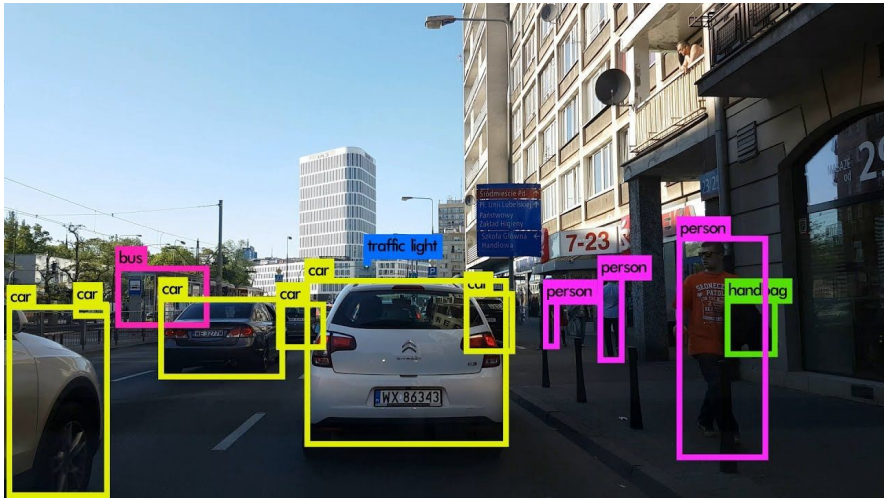
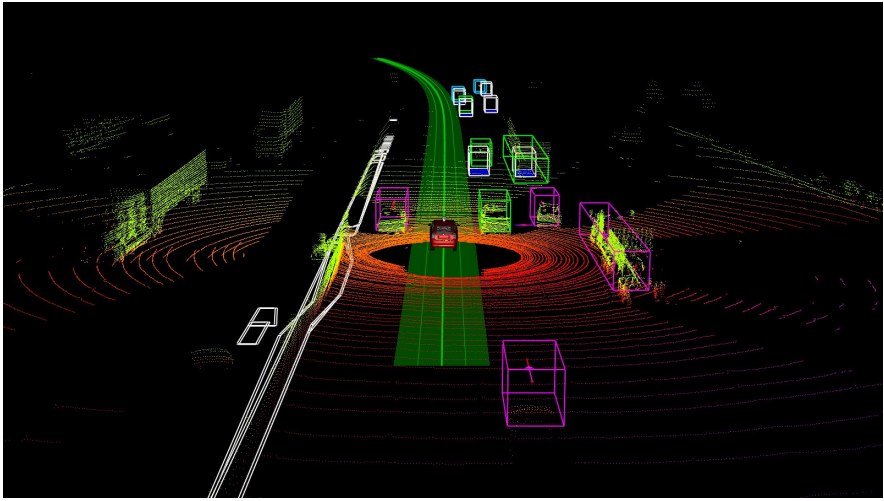
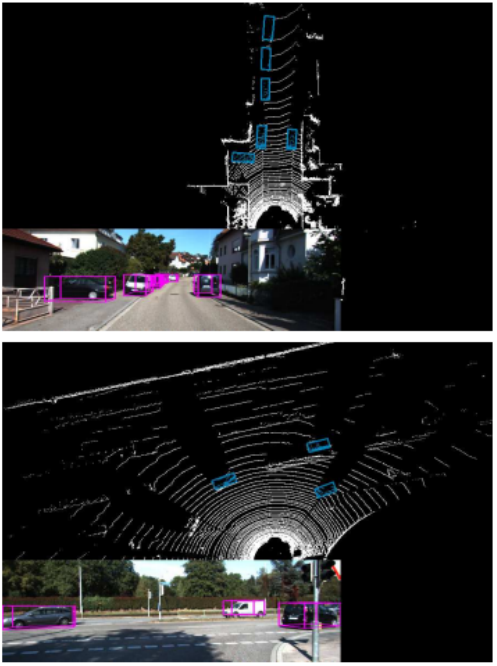
目標(biāo)檢測一直是計(jì)算機(jī)視覺領(lǐng)域中一大難題。近日,來自阿爾伯塔大學(xué)的研究者對目標(biāo)檢測領(lǐng)域的近期發(fā)展進(jìn)行了綜述,涵蓋常見數(shù)據(jù)格式和數(shù)據(jù)集、2D 目標(biāo)檢測方法和 3D 目標(biāo)檢測方法。
評論
圖片
表情